
【中国发明,中国发明授权】一种动应力自适应的振动时效系统及方法
有权-审定授权 中国
- 申请号:
- CN201510990674.5
- 专利权人:
- 常州大学
- 授权公告日/公开日:
- 2018.03.02
- 专利有效期:
- 2015.12.25-2035.12.25
- 技术分类:
- C21:铁的冶金
- 转化方式:
- 转让
- 价值度指数:
-
- 57.0分
- 价格:
- 面议
发布人
常州大学
联系人何老师
-

- 0519-88238869

-

- 302910554
-

- 13151263266

- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201510990674.5
- 申请日
- 20151225
- 公开/公告号
- CN105420485A
- 公开/公告日
- 20160323
- 申请/专利权人
- [常州大学]
- 发明/设计人
- [顾邦平, 孔德军, 王直荣, 金子迪, 赖金涛]
- 主分类号
- C21D10/00
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 江苏(32)
- 颁证日
- G06T1/00
- 代理人
摘要
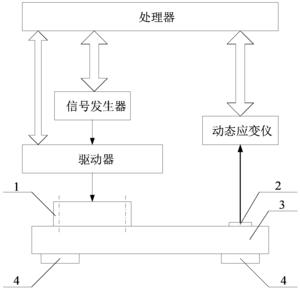
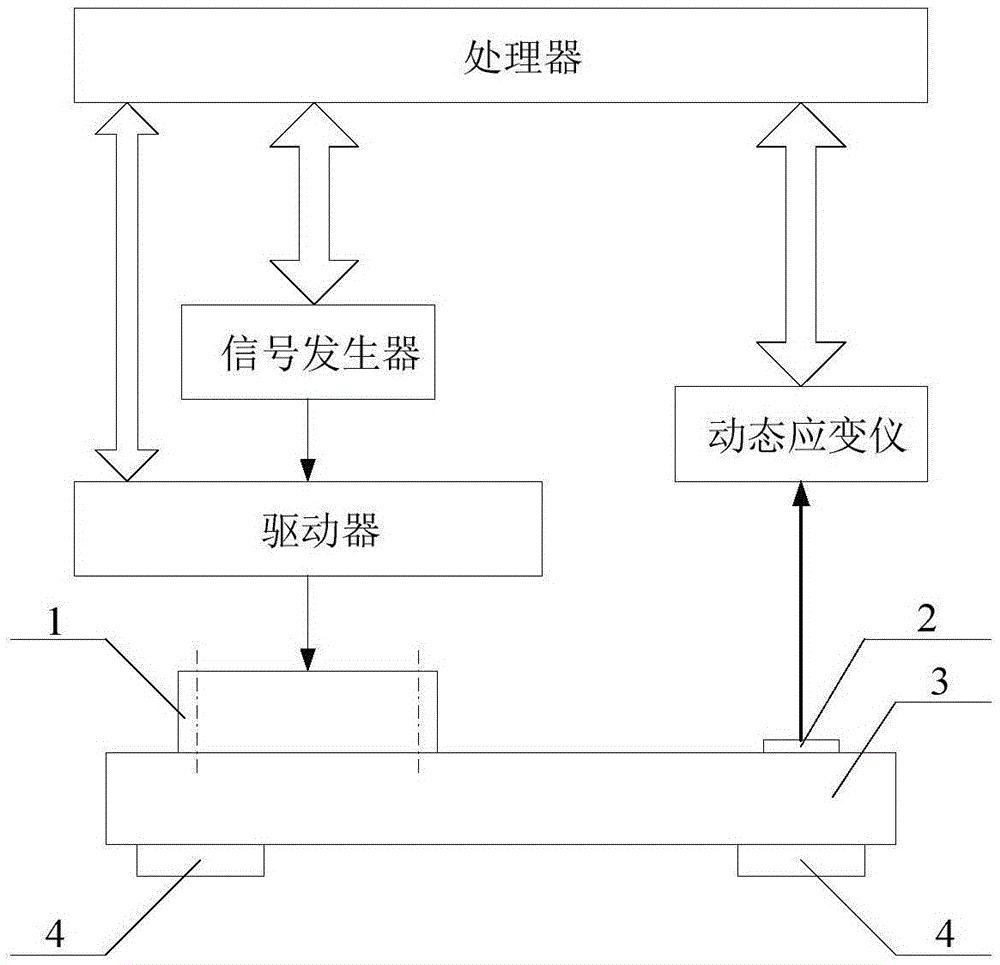
本发明涉及振动时效技术领域,特指一种动应力自适应的振动时效系统及方法。系统由处理器、信号发生器、驱动器、激振器、应变片以及动态应变仪构成;工件与激振器相互固定连接;通过支撑装置对工件进行支撑;处理器控制信号发生器输出激振频率;驱动器放大激振信号后驱动激振器,对工件进行定频振动时效处理;处理器通过计算机接口读取动态应变仪采集到的应变波形并获取应变波形的峰值,然后计算出作用在工件上的附加动应力σd;处理器每隔△t计算残余应力的衰减量△σr;同时处理器将σd+△σr代入计算出此时驱动器的输出电压U△t;处理器自动程控驱动器输入激振器的输入电压设置为U△t,从而实现了对作用在工件上的附加动应力进行自适应的调整。
法律状态
| 法律状态公告日 | 20230811 |
| 法律状态 | 专利申请权、专利权的转移 |
| 法律状态信息 | 专利权的转移 IPC(主分类):C21D 10/00 专利号:ZL2015109906745 登记生效日:20230728 变更事项:专利权人 变更前权利人:常州大学 变更后权利人:上海一起送网络科技有限公司 变更事项:地址 变更前权利人:213164 江苏省常州市武进区滆湖路1号 变更后权利人:201204 上海市浦东新区沪南路2157弄A座17楼1701 |
| 法律状态公告日 | 20180302 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20160420 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):C21D 10/00 申请日:20151225 |
| 法律状态公告日 | 20160323 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
| 事务数据公告日 | 20230811 |
| 事务数据类型 | 专利申请权、专利权的转移 |
| 转让详情 | 专利权的转移 IPC(主分类):C21D 10/00 专利号:ZL2015109906745 登记生效日:20230728 变更事项:专利权人 变更前权利人:常州大学 变更后权利人:上海一起送网络科技有限公司 变更事项:地址 变更前权利人:213164 江苏省常州市武进区滆湖路1号 变更后权利人:201204 上海市浦东新区沪南路2157弄A座17楼1701 |
权利要求
权利要求数量(7)
独立权利要求数量(2)
1.一种动应力自适应的振动时效系统,其特征在于:包括处理器、信号发 生器、驱动器、激振器、应变片、动态应变仪、支撑装置;激振器固定在工件表 面,工件安装在具有弹性的支撑装置上;处理器控制信号发生器输出幅值和频率 均独立且连续可调的正弦激振信号;信号发生器输出的正弦激振信号经由驱动器 输入激振器,进而驱动激振器产生振动;处理器程控驱动器输入激振器的输入电 压,从而自适应的调整激振器作用在工件上的附加动应力;应变片粘贴在工件上, 应变片的引出线与动态应变仪的输入通道相互连接,动态应变仪的输出通道与处 理器相互连接;
2.如权利要求1所述的一种动应力自适应的振动时效系统,其特征在于: 处理器包括获取动态应变仪采集到的应变波形的应变波形读取模块,从应变波形 中获取应变峰值ε(με)的应变识别模块,工件弹性模量设置模块,将获取的应变 峰值转换为附加动应力的动应力转换模块,残余应力衰减量△σ r(MPa)与振动时 间t(min)之间相互关系设置模块,驱动器输入激振器的输入电压U(V)与附加动 应力σ d(MPa)之间相互关系设置模块。
3.如权利要求2所述的一种动应力自适应的振动时效系统,其特征在于: 工件弹性模量设置模块中预设有工件的弹性模量E(GPa);附加动应力与应变峰 值的转换关系为 其中σ d为附加动应力,附加动应力通过处理器 的显示界面显示给用户。
4.如权利要求1所述的一种动应力自适应的振动时效系统,其特征在于: 所述动态应变仪为高精度多通道动态应变仪,所述支撑装置为弹性元件。
5.使用如权利要求1所述的一种动应力自适应的振动时效系统自适应调整 动应力的方法,其特征在于按照如下步骤进行:
(1)通过X射线衍射法获取工件的残余应力分布状态,确定峰值残余应力在 工件上的具体位置,在工件的残余应力峰值处粘贴应变片;
(2)将工件与激振器固定连接;通过支撑装置对工件进行支撑,以便激振器 对工件进行激振;接通信号连线,接通电源;
(3)在工件弹性模量设置模块中设置工件的弹性模量E(GPa);在残余应力衰 减量△σ r(MPa)与振动时间t(min)之间相互关系设置模块中预置△σ r与t之间相互 关系的函数表达式;在驱动器输入激振器电压U(V)与附加动应力σ d(MPa)之间 相互关系设置模块中预置U与σ d之间相互关系的函数表达式;
(4)应变波形读取模块获取动态应变仪采集到的应变波形;应变识别模块从 应变波形中获取应变峰值ε(με);动应力转换模块中输出的附加动应力与应变峰 值的转换关系为:
(5)处理器控制信号发生器对工件进行扫频振动,从而自动获取振动时效的 激振频率f,并在该激振频率下对工件进行定频振动时效处理;
(6)处理器每隔△t时间自动根据△σ r与t之间相互关系的函数表达式,计算残 余应力的衰减量△σ r,即此时作用在工件上的附加动应力应调整为σ d+△σ r;同 时处理器将σ d+△σ r代入U与σ d之间相互关系的函数表达式,计算出此时驱动 器的输出电压U △t;处理器自动程控驱动器输入激振器的输入电压设置为U △t, U △t
6.如权利要求5所述的方法,其特征在于:所述△t=1min。
7.如权利要求5所述的方法,其特征在于:所述信号连线包括处理器与信 号发生器之间的信号连线;处理器与驱动器之间的信号连线;处理器与动态应变 仪之间的信号连线;信号发生器与驱动器之间的信号连线;驱动器与激振器之间 的信号连线;应变片与动态应变仪之间的信号连线;所述电源包括处理器、驱动 器、信号发生器、动态应变仪和激振器的电源。
1.一种动应力自适应的振动时效系统,其特征在于:包括处理器、信号发生器、驱动器、激振器、应变片、动态应变仪、支撑装置;激振器固定在工件表面,工件安装在具有弹性的支撑装置上;处理器控制信号发生器输出幅值和频率均独立且连续可调的正弦激振信号;信号发生器输出的正弦激振信号经由驱动器输入激振器,进而驱动激振器产生振动;处理器程控驱动器输入激振器的输入电压,从而自适应的调整激振器作用在工件上的附加动应力;应变片粘贴在工件上,应变片的引出线与动态应变仪的输入通道相互连接,动态应变仪的输出通道与处理器相互连接;
2.如权利要求1所述的一种动应力自适应的振动时效系统,其特征在于:处理器包括获取动态应变仪采集到的应变波形的应变波形读取模块,从应变波形中获取应变峰值ε(με)的应变识别模块,工件弹性模量设置模块,将获取的应变峰值转换为附加动应力的动应力转换模块,残余应力衰减量△σr(MPa)与振动时间t(min)之间相互关系设置模块,驱动器输入激振器的输入电压U(V)与附加动应力σd(MPa)之间相互关系设置模块。
3.如权利要求2所述的一种动应力自适应的振动时效系统,其特征在于:工件弹性模量设置模块中预设有工件的弹性模量E(GPa);附加动应力与应变峰值的转换关系为其中σd为附加动应力,附加动应力通过处理器的显示界面显示给用户。
4.如权利要求1所述的一种动应力自适应的振动时效系统,其特征在于:所述动态应变仪为高精度多通道动态应变仪,所述支撑装置为弹性元件。
5.使用如权利要求1所述的一种动应力自适应的振动时效系统自适应调整动应力的方法,其特征在于按照如下步骤进行:
(1)通过X射线衍射法获取工件的残余应力分布状态,确定峰值残余应力在工件上的具体位置,在工件的残余应力峰值处粘贴应变片;
(2)将工件与激振器固定连接;通过支撑装置对工件进行支撑,以便激振器对工件进行激振;接通信号连线,接通电源;
(3)在工件弹性模量设置模块中设置工件的弹性模量E(GPa);在残余应力衰减量△σr(MPa)与振动时间t(min)之间相互关系设置模块中预置△σr与t之间相互 关系的函数表达式;在驱动器输入激振器电压U(V)与附加动应力σd(MPa)之间相互关系设置模块中预置U与σd之间相互关系的函数表达式;
(4)应变波形读取模块获取动态应变仪采集到的应变波形;应变识别模块从应变波形中获取应变峰值ε(με);动应力转换模块中输出的附加动应力与应变峰值的转换关系为: σ d = E ϵ 1000 ( M P a ) ; ]]>
(5)处理器控制信号发生器对工件进行扫频振动,从而自动获取振动时效的激振频率f,并在该激振频率下对工件进行定频振动时效处理;
(6)处理器每隔△t时间自动根据△σr与t之间相互关系的函数表达式,计算残余应力的衰减量△σr,即此时作用在工件上的附加动应力应调整为σd+△σr;同时处理器将σd+△σr代入U与σd之间相互关系的函数表达式,计算出此时驱动器的输出电压U△t;处理器自动程控驱动器输入激振器的输入电压设置为U△t,U△t上限,其中U上限为激振器工作电压的上限,从而实现了对作用在工件上的附加动应力进行自适应的调整。
6.如权利要求5所述的方法,其特征在于:所述△t=1min。
7.如权利要求5所述的方法,其特征在于:所述信号连线包括处理器与信号发生器之间的信号连线;处理器与驱动器之间的信号连线;处理器与动态应变仪之间的信号连线;信号发生器与驱动器之间的信号连线;驱动器与激振器之间的信号连线;应变片与动态应变仪之间的信号连线;所述电源包括处理器、驱动器、信号发生器、动态应变仪和激振器的电源。
说明书
技术领域
本发明涉及振动时效技术领域,特指一种动应力自适应的振动时效系统及方法。
背景技术
振动时效技术是机械工程领域中广泛使用的残余应力消除方法,即对工件施加机械振动载荷,当工件内部的残余应力和附加的动应力之和超过材料的屈服极限时,材料内部将会发生塑性变形,从而使得材料内部的残余应力得以释放。
对工件进行振动时效处理时,其内部的残余应力在不断的发生松弛,即随着振动时效处理的进行工件内部的残余应力在不断的减少;现有的振动时效工艺,对于作用在工件上的附加动应力是恒定不变的,即振动时效处理初始时刻作用在工件上的附加动应力,这样必然导致工件内部残余应力和附加动应力之和不断减少,当这两者的和小于材料的屈服极限时,材料内部的残余应力不再会发生松弛,因此,为了提高振动时效消除残余应力的效果,就要在振动时效处理过程中动态的调整作用在工件上的附加动应力。
发明内容
为了能够准确、实时的监测作用在工件上的附加动应力,以及对附加动应力进行自适应的调整,本发明提出一种动应力自适应的振动时效系统及方法。
动应力自适应的振动时效系统,包括处理器、信号发生器、驱动器、激振器、应变片、动态应变仪、支撑装置;激振器固定在工件表面,工件安装在具有弹性的支撑装置上;处理器控制信号发生器输出幅值和频率均独立且连续可调的正弦激振信号;信号发生器输出的正弦激振信号经由驱动器输入激振器,进而驱动激振器产生振动。
处理器程控驱动器输入激振器的输入电压,从而自适应的调整激振器作用在工件上的附加动应力。
应变片粘贴在工件上,应变片的引出线与动态应变仪的输入通道相互连接,动态应变仪的输出通道与处理器相互连接;
处理器包括获取动态应变仪采集到的应变波形的应变波形读取模块,从应变波形中获取应变峰值ε(με)的应变识别模块,工件弹性模量设置模块,将获取的应变峰值转换为附加动应力的动应力转换模块,残余应力衰减量Δσr(MPa)与振 动时间t(min)之间相互关系设置模块,驱动器输入激振器的输入电压U(V)与附加动应力σd(MPa)之间相互关系设置模块。
工件弹性模量设置模块中预设有工件的弹性模量E(GPa);附加动应力与应变峰值的转换关系为其中σd为附加动应力,附加动应力通过处理器的显示界面显示给用户。
进一步,动态应变仪为高精度多通道动态应变仪。
进一步,支撑装置为弹性元件。
用于自适应调整动应力的方法包括以下步骤:
(1)通过X射线衍射法获取工件的残余应力分布状态,确定峰值残余应力在工件上的具体位置,在工件的残余应力峰值处粘贴应变片。
(2)将工件与激振器固定连接;通过支撑装置对工件进行支撑,以便激振器对工件进行激振;接通信号连线,接通电源。
(3)在工件弹性模量设置模块中设置工件的弹性模量E(GPa);在残余应力衰减量Δσr(MPa)与振动时间t(min)之间相互关系设置模块中预置Δσr与t之间相互关系的函数表达式;在驱动器输入激振器电压U(V)与附加动应力σd(MPa)之间相互关系设置模块中预置U与σd之间相互关系的函数表达式。
(4)应变波形读取模块获取动态应变仪采集到的应变波形;应变识别模块从应变波形中获取应变峰值ε(με);动应力转换模块中输出的附加动应力与应变峰值的转换关系为: σ d = E ϵ 1000 ( M P a ) . ]]>
(5)处理器控制信号发生器对工件进行扫频振动,从而自动获取振动时效的激振频率f,并在该激振频率下对工件进行定频振动时效处理。
(6)处理器每隔Δt(Δt=1min)时间自动根据Δσr与t之间相互关系的函数表达式,计算残余应力的衰减量Δσr,即此时作用在工件上的附加动应力应调整为σd+Δσr;同时处理器将σd+Δσr代入U与σd之间相互关系的函数表达式,计算出此时驱动器的输出电压UΔt;处理器自动程控驱动器输入激振器的输入电压设置为UΔt(UΔt上限,其中U上限为激振器工作电压的上限),从而实现了对作用在工件上的附加动应力进行自适应的调整。
所述信号连线包括处理器与信号发生器之间的信号连线;处理器与驱动器之间的信号连线;处理器与动态应变仪之间的信号连线;信号发生器与驱动器之间的信号连线;驱动器与激振器之间的信号连线;应变片与动态应变仪之间的信号连线;所述电源包括处理器、驱动器、信号发生器、动态应变仪和激振器的电源。
本发明的技术构思是:由处理器、信号发生器、驱动器、激振器、应变片以及动态应变仪构成动应力自适应的振动时效系统;工件与激振器相互固定连接;通过支撑装置对工件进行支撑,以便激振器对工件进行激振;处理器控制信号发生器输出激振频率f;驱动器放大激振信号后驱动激振器,对工件进行定频振动时效处理;处理器通过计算机接口读取动态应变仪采集到的应变波形并获取应变波形的峰值,然后计算出作用在工件上的附加动应力σd;处理器每隔Δt(Δt=1min)时间自动根据Δσr与t之间相互关系的函数表达式,计算残余应力的衰减量Δσr;同时处理器将σd+Δσr代入U与σd之间相互关系的函数表达式,计算出此时驱动器的输出电压UΔt;处理器自动程控驱动器输入激振器的输入电压设置为UΔt(UΔt上限,其中U上限为激振器工作电压的上限),从而实现了对作用在工件上的附加动应力进行自适应的调整。
本发明的有益效果如下:
1、能够将动态应变仪输出的应变波形转换为附加动应力,实时、准确地获知作用在工件上的附加动应力。
2、处理器能够实时计算出振动时效过程中工件内部残余应力的衰减量,根据工件内部残余应力的衰减量,自动调整驱动器输入激振器的输入电压,从而在振动时效过程中自适应的调整作用在工件上的附加动应力,确保了振动时效消除残余应力的效果。
3、处理器能够自动的确定作用在工件上的附加动应力、振动时效过程中工件内部残余应力的衰减量以及驱动器输入激振器的输入电压,无需手动操作,减少了工作量,提高了工作的效率。
附图说明
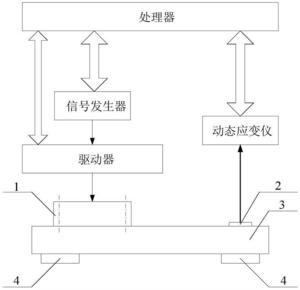
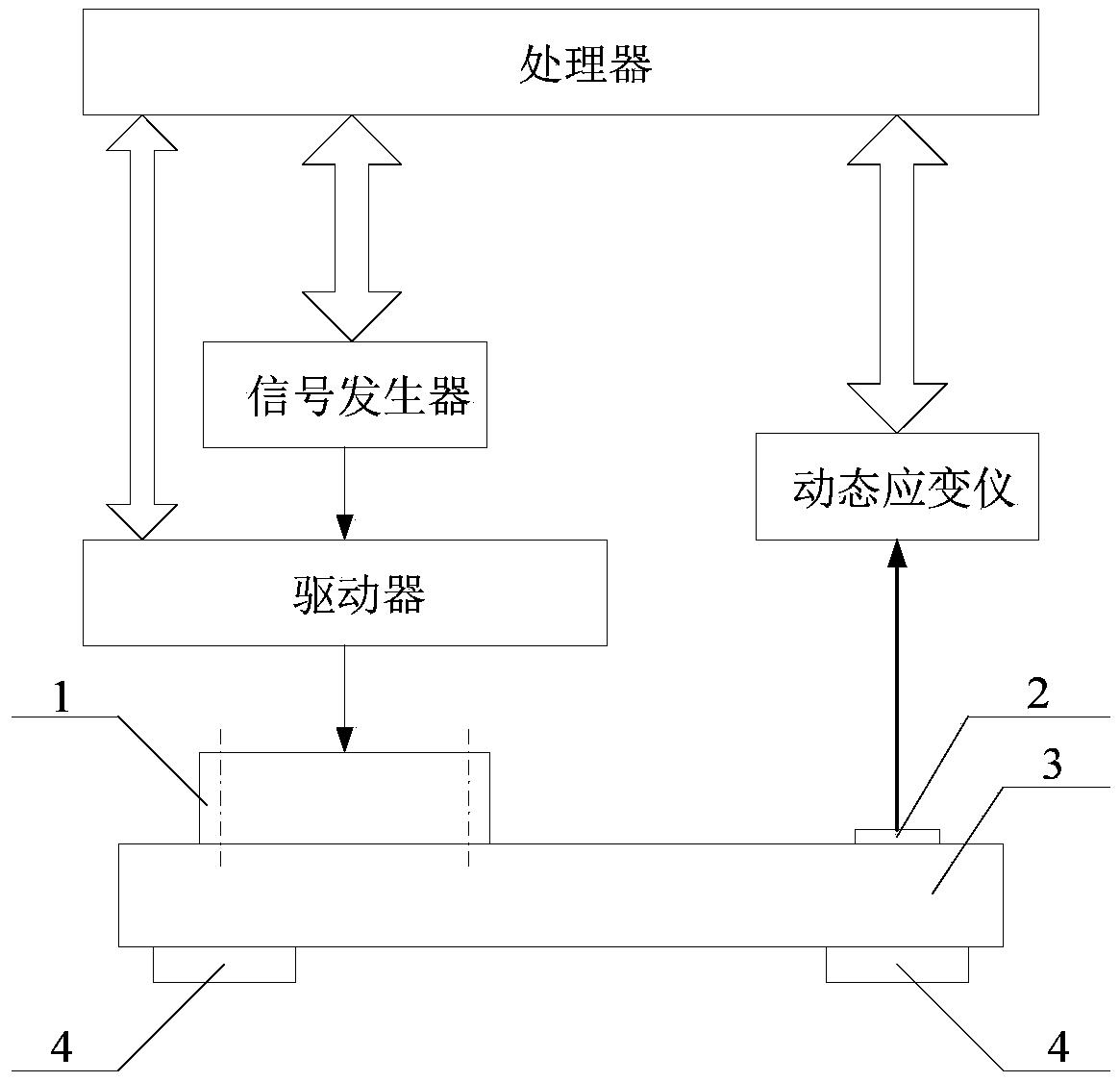
图1动应力自适应的振动时效系统示意图。
具体实施方式
参照附图,进一步说明本发明:
动应力自适应的振动时效系统,包括处理器、信号发生器、驱动器、激振器1、应变片2、动态应变仪、支撑装置4;激振器1固定在工件3表面,工件3安装在具有弹性的支撑装置4上;处理器控制信号发生器输出幅值和频率均独立且连续可调的正弦激振信号;信号发生器输出的正弦激振信号经由驱动器输入激振器1,进而驱动激振器1产生振动。
处理器程控驱动器输入激振器1的输入电压,从而自适应的调整激振器1作用在工件3上的附加动应力。
应变片2粘贴在工件3上,应变片2的引出线与动态应变仪的输入通道相互连接,动态应变仪的输出通道与处理器相互连接;
处理器包括获取动态应变仪采集到的应变波形的应变波形读取模块,从应变波形中获取应变峰值ε(με)的应变识别模块,工件3弹性模量设置模块,将获取的应变峰值转换为附加动应力的动应力转换模块,残余应力衰减量Δσr(MPa)与振动时间t(min)之间相互关系设置模块,驱动器输入激振器1的输入电压U(V)与附加动应力σd(MPa)之间相互关系设置模块。
工件3弹性模量设置模块中预设有工件3的弹性模量E(GPa);附加动应力与应变峰值的转换关系为其中附加动应力通过处理器的显示界面显示给用户。
进一步,动态应变仪为高精度多通道动态应变仪。
进一步,支撑装置4为弹性元件。
用于自适应调整动应力的方法包括以下步骤:
(1)通过X射线衍射法获取工件3的残余应力分布状态,确定峰值残余应力在工件3上的具体位置,在工件3的残余应力峰值处粘贴应变片2。
(2)将工件3与激振器1固定连接;通过支撑装置4对工件3进行支撑,以便激振器1对工件3进行激振;接通信号连线,接通电源。
(3)在工件3弹性模量设置模块中设置工件3的弹性模量E(GPa);在残余应力衰减量Δσr(MPa)与振动时间t(min)之间相互关系设置模块中预置Δσr与t之间相互关系的函数表达式;在驱动器输入激振器1电压U(V)与附加动应力σd(MPa)之间相互关系设置模块中预置U与σd之间相互关系的函数表达式。
(4)应变波形读取模块获取动态应变仪采集到的应变波形;应变识别模块从应变波形中获取应变峰值ε(με);动应力转换模块中输出的附加动应力与应变峰值的转换关系为: σ d = E ϵ 1000 ( M P a ) . ]]>
(5)处理器控制信号发生器对工件3进行扫频振动,从而自动获取振动时效的激振频率f,并在该激振频率下对工件3进行定频振动时效处理。
(6)处理器每隔Δt(Δt=1min)时间自动根据Δσr与t之间相互关系的函数表达式,计算残余应力的衰减量Δσr,即此时作用在工件3上的附加动应力应调整为σd+Δσr;同时处理器将σd+Δσr代入U与σd之间相互关系的函数表达式,计算出此时驱动器的输出电压UΔt;处理器自动程控驱动器输入激振器1的输入电压设置为UΔt(UΔt上限,其中U上限为激振器1工作电压的上限),从而实现了对作用在工件3上的附加动应力进行自适应的调整。
所述信号连线包括处理器与信号发生器之间的信号连线;处理器与驱动器之间的信号连线;处理器与动态应变仪之间的信号连线;信号发生器与驱动器之间的信号连线;驱动器与激振器1之间的信号连线;应变片2与动态应变仪之间的信号连线;所述电源包括处理器、驱动器、信号发生器、动态应变仪和激振器1的电源。
本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围不应当被视为仅限于实施例所陈述的具体形式,本发明的保护范围也及于本领域技术人员根据本发明构思所能够想到的等同技术手段。
价值度评估
技术价值
经济价值
法律价值
0 0 057.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:57.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【2 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间10 年】专利权的维持时间越长,其价值对于权利人而言越高。 尤其重要是,该专利 【权利转移1 次】、 都从侧面反应出该专利的技术、经济和法律价值。
技术价值 29.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
26 个月独立权利要求数量
1 个从属权利要求数量
5 个说明书页数
4 页实施例个数
1 个发明人数量
5 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
2 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 9.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
1 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
10法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...