【中国发明,中国发明授权】一种分体式微创手术机器人的控制系统
有权-审定授权 中国
- 申请号:
- CN201510974846.X
- 专利权人:
- 哈尔滨工业大学
- 授权公告日/公开日:
- 2018.03.30
- 专利有效期:
- 2015.12.22-2035.12.22
- 技术分类:
- A61:医学或兽医学;卫生学
- 转化方式:
- 转让
- 价值度指数:
-
- 59.0分
- 价格:
- 面议
发布人
哈尔滨工业大学
联系人何老师
-

- 13151263266

-

- 302910554
-

- 13151263266

- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201510974846.X
- 申请日
- 20151222
- 公开/公告号
- CN105395254A
- 公开/公告日
- 20160316
- 申请/专利权人
- [哈尔滨工业大学]
- 发明/设计人
- [付宜利, 艾跃, 潘博, 王树国, 牛国君, 曲效锋]
- 主分类号
- A61B34/37
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 黑龙江(23)
- 颁证日
- G06T1/00
- 代理人
- [牟永林]
摘要
一种分体式微创手术机器人的控制系统,它涉及一种控制系统,具体涉及一种分体式微创手术机器人的控制系统。本发明为了解决现有微创手术机器人的控制系统软硬件开放性差、结构复杂、实时性不好、开发和维护不方便问题。本发明包括硬件子系统和软件子系统,所述硬件子系统包括主控制台和从手机械臂,主控制台包括枢纽工控机、控制面板、脚踏开关、控制电路、第一主操作手、第二主操作手、显示器、3D显示系统和工业路由器,枢纽工控机由供电结构、第一数据接口、第二数据接口、第三数据接口和通信接口。本发明属于微创手术领域。
法律状态
| 法律状态公告日 | 20240628 |
| 法律状态 | 专利申请权、专利权的转移 |
| 法律状态信息 | 专利权的转移 IPC(主分类):A61B 34/37 专利号:ZL201510974846X 登记生效日:20240611 变更事项:专利权人 变更前权利人:哈尔滨工业大学 变更后权利人:杭州唯精医疗机器人有限公司 变更事项:国家或地区 变更前权利人:中国 变更后权利人:中国 变更事项:地址 变更前权利人:150001 黑龙江省哈尔滨市南岗区西大直街92号 变更后权利人:311199 浙江省杭州市余杭区余杭街道科技大道39号1幢1层、2幢1-4层 |
| 法律状态公告日 | 20180330 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20160413 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):A61B 34/37 申请日:20151222 |
| 法律状态公告日 | 20160316 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
| 事务数据公告日 | 20240628 |
| 事务数据类型 | 专利申请权、专利权的转移 |
| 转让详情 | 专利权的转移 IPC(主分类):A61B 34/37 专利号:ZL201510974846X 登记生效日:20240611 变更事项:专利权人 变更前权利人:哈尔滨工业大学 变更后权利人:杭州唯精医疗机器人有限公司 变更事项:国家或地区 变更前权利人:中国 变更后权利人:中国 变更事项:地址 变更前权利人:150001 黑龙江省哈尔滨市南岗区西大直街92号 变更后权利人:311199 浙江省杭州市余杭区余杭街道科技大道39号1幢1层、2幢1-4层 |
权利要求
权利要求数量(3)
独立权利要求数量(1)
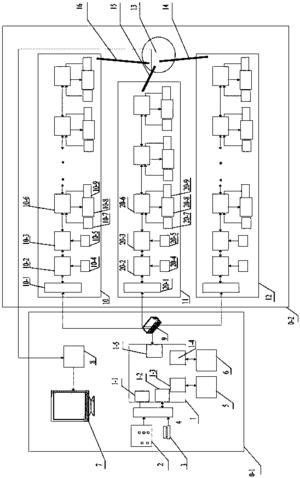
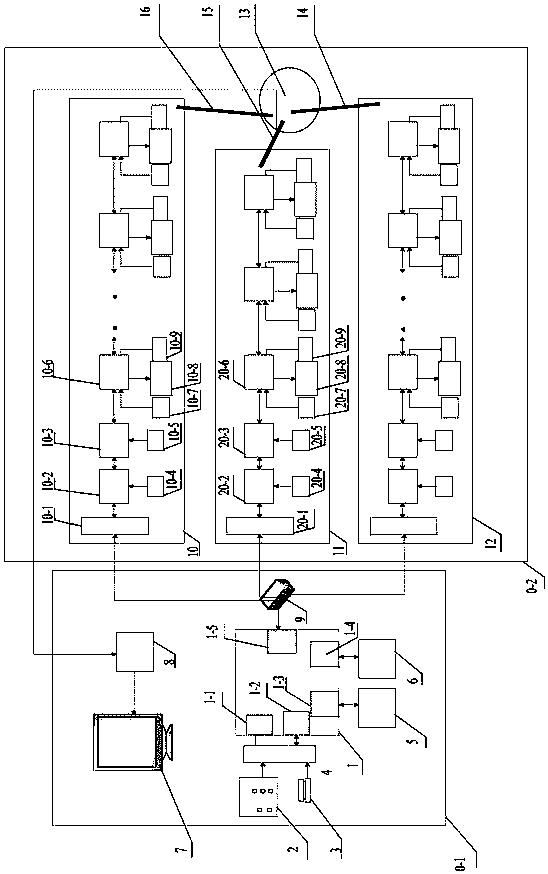
1.一种分体式微创手术机器人的控制系统,其特征在于:所述一种分体式微创手术机 器人的控制系统包括硬件子系统和软件子系统,所述硬件子系统包括主控制台(0-1)和从 手机械臂(0-2),主控制台(0-1)包括枢纽工控机(1)、控制面板(2)、脚踏开关(3)、 控制电路(4)、第一主操作手(5)、第二主操作手(6)、显示器(7)、3D显示系统(8) 和工业路由器(9),枢纽工控机(1)由供电结构(1-1)、第一数据接口(1-2)、第二数据 接口(1-3)、第三数据接口(1-4)和通信接口(1-5),控制面板(2)和脚踏开关(3)均 通过控制电路(4)与第一数据接口(1-2)连接,供电接口(1-1)与控制电路(4)连接, 第一主操作手(5)与第二数据接口(1-3)连接,第二主操作手(6)与第三数据接口(1-4) 连接,通信接口(1-5)通过工业路由器与从手机械臂(0-2)连接,显示器(7)与3D显 示系统(8)连接,3D显示系统(8)的图像信号接收端与腹腔镜(15)连接。
2.根据权利要求1所述一种分体式微创手术机器人的控制系统,其特征在于:从手机 械臂(0-2)包括第一分体式机械臂(10)、第二分体式机械臂(11)和第三分体式机械臂 (12),
第一分体式机械臂(10)和第三分体式机械臂(12)均由第一多轴控制器(101)、第 一驱动单元(102)、第二驱动单元(103)、第一外置编码器(104)、第二外置编码器(105)、 七个第三驱动单元(106)、七个第三外置编码器(107)、七个第一直流电机(108)和七个 第一直流电机编码器(109)组成,每个第一直流电机(108)与相对应的一个第一直流电 机编码器(109)组成一个控制闭环,第一多轴控制器(101)、第一驱动单元(102)、第二 驱动单元(103)、七个第三驱动单元(106)依次连接,第一外置编码器(104)与第一驱 动单元(102)连接,第二外置编码器(105)与第二驱动单元(103)连接,每个第三驱动 单元(106)分别与一个第一直流电机(108)连接和一个第三外置编码器(107)连接;
第二分体式机械臂(11)由第二多轴控制器(201)、第四驱动单元(202)、第五驱动 单元(203)、第四外置编码器(204)、第五外置编码器(205)、三个第六驱动单元(206)、 三个第六外置编码器(207)、三个第二直流电机(208)和三个第二直流电机编码器(209) 组成,每个第二直流电机(208)与相对应的一个第二直流电机编码器(209)组成一个控 制闭环,第二多轴控制器(201)、第四驱动单元(202)、第五驱动单元(203)、三个第六 驱动单元(206)依次连接,第四驱动单元(202)与第四外置编码器(204)连接,第五驱 动单元(203)与第五外置编码器(205)连接,每个第六驱动单元(206)分别与一个第二 直流电机(208)和一个第六外置编码器(207)连接;
第二多轴控制器(201)、两个第一多轴控制器(101)均与工业路由器(9)连接。
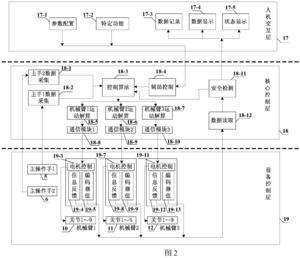
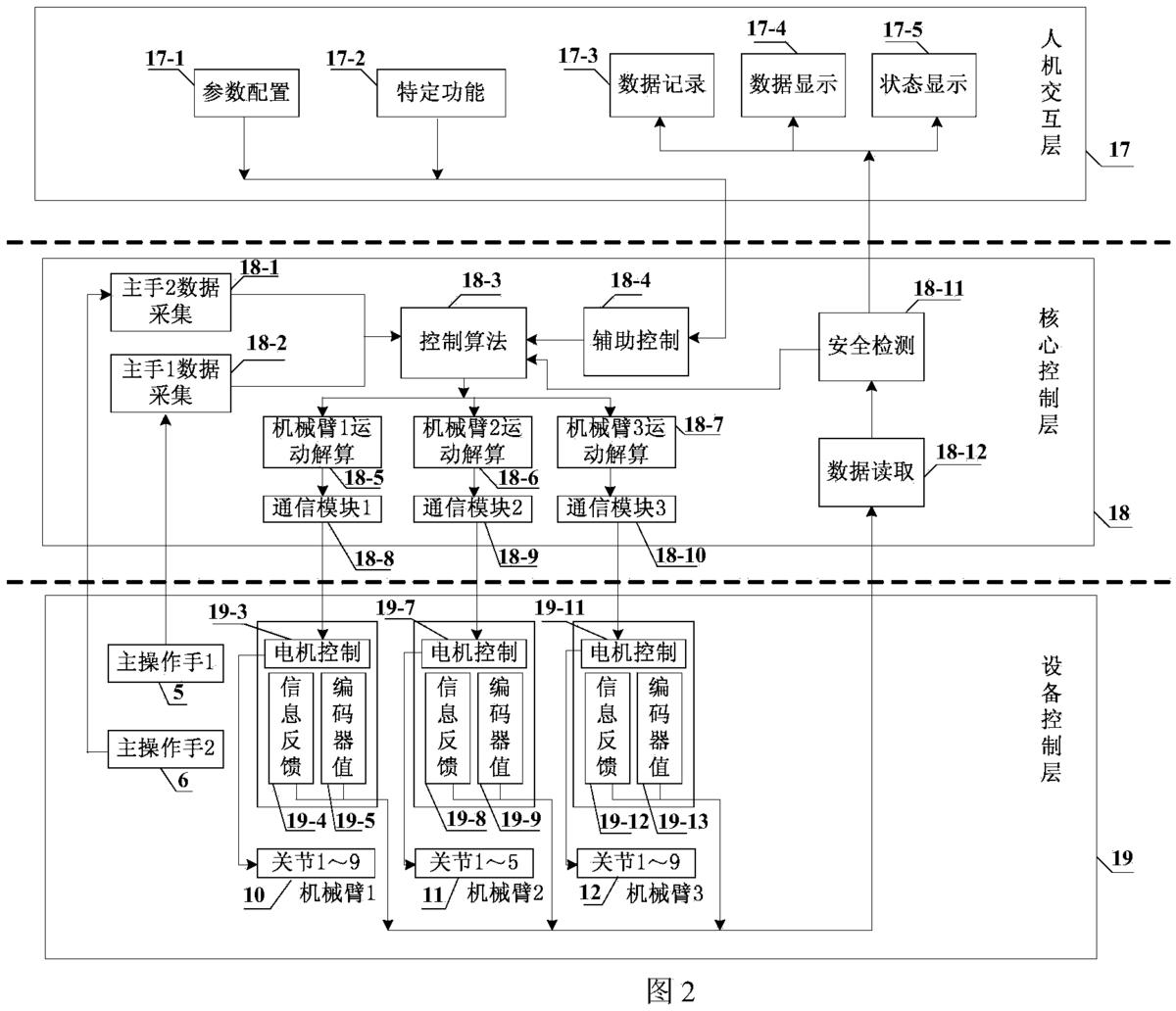
3.根据权利要求1或2所述一种分体式微创手术机器人的控制系统,其特征在于:所 述软件子系统包括人机交互层(17)、核心控制层(18)和设备控制层(19),
人机交互层(17)包括参数配置模块(17-1)、特定功能模块(17-2)、数据记录模块(17-3)、 数据显示模块(17-4)和状态显示模块(17-5),参数配置模块(17-1)用于记录术前或术 中对机器人系统的主从控制比例设置以及主手和从手机械臂的对应关系;特定功能模块 (17-2)用于记录术中重新调整第一主操作手(1)和第二主操作手(2)的位置,特定功 能模块(17-2)还用于记录切换第一主操作手(1)、第二主操作手(2)控制对象的控制信 号;数据记录模块(17-3)用作记录系统中出现的错误代号;数据显示模块(17-4)用于显 示关键系统数据以及实时观察系统状态;状态显示模块(17-5)用于显示系统运行状态以 及错误状态提示;
核心控制层(18)包括第二主手数据采集模块(18-1)、第一主手数据采集模块(18-2)、 控制算法模块(18-3)、辅助控制模块(18-4)、第一机械臂运动解算模块(18-5)、第二机 械臂运动解算模块(18-6)、第三机械臂运动解算模块(18-7)、第一通信模块(18-8)、第 二通信模块(18-9)、第三通信模块(18-10)、安全检测模块(18-11)和数据读取模块(18-12), 第一主手数据采集模块(18-2)和第二主手数据采集模块(18-1)用于采集第一主操作手(5) 和第二主操作手(6)的运动信息;辅助控制模块(18-4)用于处理来自参数配置模块(17-1) 和特定功能模块(17-2)的控制信号;数据读取模块(18-12)用于读取从两个第一多轴控 制器(101)和第二多轴控制器(201)上传的数据;安全检测模块(18-11)用于监测从两 个第一多轴控制器(101)和第二多轴控制器(201)传给控制算法模块(18-3)和人机交 互层(17)的数据;控制算法模块(18-3)用于结合第二主手数据采集模块(18-1)、第一 主手数据采集模块(18-2)、辅助控制模块(18-4)、安全检测模块(18-11)传递来的数据 进行控制算法解算,并将结果发送给对应的第一机械臂运动解算模块(18-5)、第二机械臂 运动解算模块(18-6)、第三机械臂运动解算模块(18-7);第一机械臂运动解算模块(18-5)、 第二机械臂运动解算模块(18-6)、第三机械臂运动解算模块(18-7)用于接收控制算法模 块(18-3)的运算结果,并根据对应的机械臂模型进行逆运动学求解;第一通信模块(18-8)、 第二通信模块(18-9)、第三通信模块(18-10)用于将第一机械臂运动解算模块(18-5)、 第二机械臂运动解算模块(18-6)、第三机械臂运动解算模块(18-7)的数据按照MODBUS 协议进行打包,并传递给设备控制层(19);
设备控制层(19)包括七个第一电机控制模块(19-3)、七个第一信息反馈模块(19-4)、 九个第一编码器反馈模块(19-5)、三个第二电机控制模块(19-7)、三个第二信息反馈模块 (19-8)、五个第二编码器反馈模块(19-9)、七个第三电机控制模块(19-11)、七个第三信 息反馈模块(19-12)和九个第三编码器反馈模块(19-13),七个第一电机控制模块(19-3)、 三个第二电机控制模块(19-7)、七个第三电机控制模块(19-11)用于将来自核心控制层(18) 的数据按照EtherCat协议转换成电机控制命令发送给机械臂关节驱动电机,带动第一机械 臂关节(10)、第二机械臂关节(11)、第三机械臂关节(12)运动;七个第一信息反馈模 块(19-4)、三个第二信息反馈模块(19-8)、七个第三信息反馈模块(19-12)用于读取所 在机械臂关节驱动电机的运行状态及运行参数,并上传到核心控制层(18)进行处理;九 个第一编码器反馈模块(19-5)、九个第三编码器反馈模块(19-13)用于将第一机械臂关节 (10)和第三机械臂关节(12)各自的第一外置编码器(104)、第二外置编码器(105)、 七个第三外置编码器(107)的读数上传到核心控制层(18)进行处理;五个第二编码器反 馈模块(19-9)用于将第二机械臂关节(11)的第四外置编码器(204)、第五外置编码器 (205)、三个第六外置编码器(207)的读数上传到核心控制层(18)进行处理。
1.一种分体式微创手术机器人的控制系统,其特征在于:所述一种分体式微创手术机器人的控制系统包括硬件子系统和软件子系统,所述硬件子系统包括主控制台(0-1)和从手机械臂(0-2),主控制台(0-1)包括枢纽工控机(1)、控制面板(2)、脚踏开关(3)、控制电路(4)、第一主操作手(5)、第二主操作手(6)、显示器(7)、3D显示系统(8)和工业路由器(9),枢纽工控机(1)由供电结构(1-1)、第一数据接口(1-2)、第二数据接口(1-3)、第三数据接口(1-4)和通信接口(1-5),控制面板(2)和脚踏开关(3)均通过控制电路(4)与第一数据接口(1-2)连接,供电接口(1-1)与控制电路(4)连接,第一主操作手(5)与第二数据接口(1-3)连接,第二主操作手(6)与第三数据接口(1-4)连接,通信接口(1-5)通过工业路由器与从手机械臂(0-2)连接,显示器(7)与3D显示系统(8)连接,3D显示系统(8)的图像信号接收端与腹腔镜(15)连接。
2.根据权利要求1所述一种分体式微创手术机器人的控制系统,其特征在于:从手机械臂(0-2)包括第一分体式机械臂(10)、第二分体式机械臂(11)和第三分体式机械臂(12),
第一分体式机械臂(10)和第三分体式机械臂(12)均由第一多轴控制器(101)、第一驱动单元(102)、第二驱动单元(103)、第一外置编码器(104)、第二外置编码器(105)、七个第三驱动单元(106)、七个第三外置编码器(107)、七个第一直流电机(108)和七个第一直流电机编码器(109)组成,每个第一直流电机(108)与相对应的一个第一直流电机编码器(109)组成一个控制闭环,第一多轴控制器(101)、第一驱动单元(102)、第二驱动单元(103)、七个第三驱动单元(106)依次连接,第一外置编码器(104)与第一驱动单元(102)连接,第二外置编码器(105)与第二驱动单元(103)连接,每个第三驱动单元(106)分别与一个第一直流电机(108)连接和一个第三外置编码器(107)连接;
第二分体式机械臂(11)由第二多轴控制器(201)、第四驱动单元(202)、第五驱动单元(203)、第四外置编码器(204)、第五外置编码器(205)、三个第六驱动单元(206)、三个第六外置编码器(207)、三个第二直流电机(208)和三个第二直流电机编码器(209)组成,每个第二直流电机(208)与相对应的一个第二直流电机编码器(209)组成一个控制闭环,第二多轴控制器(201)、第四驱动单元(202)、第五驱动单元(203)、三个第六驱动单元(206)依次连接,第四驱动单元(202)与第四外置编码器(204)连接,第五驱动单元(203)与第五外置编码器(205)连接,每个第六驱动单元(206)分别与一个第二直流电机(208)和一个第六外置编码器(207)连接;
第二多轴控制器(201)、两个第一多轴控制器(101)均与工业路由器(9)连接。
3.根据权利要求1或2所述一种分体式微创手术机器人的控制系统,其特征在于:所述软件子系统包括人机交互层(17)、核心控制层(18)和设备控制层(19),
人机交互层(17)包括参数配置模块(17-1)、特定功能模块(17-2)、数据记录模块(17-3)、数据显示模块(17-4)和状态显示模块(17-5),参数配置模块(17-1)用于记录术前或术中对机器人系统的主从控制比例设置以及主手和从手机械臂的对应关系;特定功能模块(17-2)用于记录术中重新调整第一主操作手(1)和第二主操作手(2)的位置,特定功能模块(17-2)还用于记录切换第一主操作手(1)、第二主操作手(2)控制对象的控制信号;数据记录模块(17-3)用作记录系统中出现的错误代号;数据显示模块(17-4)用于显示关键系统数据以及实时观察系统状态;状态显示模块(17-5)用于显示系统运行状态以及错误状态提示;
核心控制层(18)包括第二主手数据采集模块(18-1)、第一主手数据采集模块(18-2)、控制算法模块(18-3)、辅助控制模块(18-4)、第一机械臂运动解算模块(18-5)、第二机械臂运动解算模块(18-6)、第三机械臂运动解算模块(18-7)、第一通信模块(18-8)、第二通信模块(18-9)、第三通信模块(18-10)、安全检测模块(18-11)和数据读取模块(18-12),第一主手数据采集模块(18-2)和第二主手数据采集模块(18-1)用于采集第一主操作手(5)和第二主操作手(6)的运动信息;辅助控制模块(18-4)用于处理来自参数配置模块(17-1)和特定功能模块(17-2)的控制信号;数据读取模块(18-12)用于读取从两个第一多轴控制器(101)和第二多轴控制器(201)上传的数据;安全检测模块(18-11)用于监测从两个第一多轴控制器(101)和第二多轴控制器(201)传给控制算法模块(18-3)和人机交互层(17)的数据;控制算法模块(18-3)用于结合第二主手数据采集模块(18-1)、第一主手数据采集模块(18-2)、辅助控制模块(18-4)、安全检测模块(18-11)传递来的数据进行控制算法解算,并将结果发送给对应的第一机械臂运动解算模块(18-5)、第二机械臂运动解算模块(18-6)、第三机械臂运动解算模块(18-7);第一机械臂运动解算模块(18-5)、第二机械臂运动解算模块(18-6)、第三机械臂运动解算模块(18-7)用于接收控制算法模块(18-3)的运算结果,并根据对应的机械臂模型进行逆运动学求解;第一通信模块(18-8)、第二通信模块(18-9)、第三通信模块(18-10)用于将第一机械臂运动解算模块(18-5)、第二机械臂运动解算模块(18-6)、第三机械臂运动解算模块(18-7)的数据按照MODBUS协议进行打包,并传递给设备控制层(19);
设备控制层(19)包括七个第一电机控制模块(19-3)、七个第一信息反馈模块(19-4)、九个第一编码器反馈模块(19-5)、三个第二电机控制模块(19-7)、三个第二信息反馈模块(19-8)、五个第二编码器反馈模块(19-9)、七个第三电机控制模块(19-11)、七个第三信息反馈模块(19-12)和九个第三编码器反馈模块(19-13),七个第一电机控制模块(19-3)、三个第二电机控制模块(19-7)、七个第三电机控制模块(19-11)用于将来自核心控制层(18)的数据按照EtherCat协议转换成电机控制命令发送给机械臂关节驱动电机,带动第一机械臂关节(10)、第二机械臂关节(11)、第三机械臂关节(12)运动;七个第一信息反馈模块(19-4)、三个第二信息反馈模块(19-8)、七个第三信息反馈模块(19-12)用于读取所在机械臂关节驱动电机的运行状态及运行参数,并上传到核心控制层(18)进行处理;九个第一编码器反馈模块(19-5)、九个第三编码器反馈模块(19-13)用于将第一机械臂关节(10)和第三机械臂关节(12)各自的第一外置编码器(104)、第二外置编码器(105)、七个第三外置编码器(107)的读数上传到核心控制层(18)进行处理;五个第二编码器反馈模块(19-9)用于将第二机械臂关节(11)的第四外置编码器(204)、第五外置编码器(205)、三个第六外置编码器(207)的读数上传到核心控制层(18)进行处理。
说明书
技术领域
本发明涉及一种控制系统,具体涉及一种分体式微创手术机器人的控制系统,属于微创手术领域。
背景技术
微创手术机器人作为诸多医疗机器人的一种,不仅能够克服传统微创手术自身的缺点,更可以协助医生完成手术部位的精确定位,减轻医生的劳动强度,提高手术治疗的精度与质量,缩短治疗时间。其作为发展中的新型产业,有着不可估量的广阔市场前景。
在现有的对微创手术机器人的研究中,有的系统采用专用的机器人控制器。虽然这种方案提高了控制系统的运算速度,有利于系统的实时性,但是所采用的控制器基本上都是采用专用语言、专用操作系统、专用微处理器等,使得控制器不通用,更不利于系统的维护与开发;有的采用基于DSP嵌入式结构的控制系统。这种方案运算速度高、稳定性好、开放性好,但却存在开发周期长、编程调试繁琐、非相关专业人员维护困难等缺点;另外,基于运动控制卡的微创手术机器人系统在国内外的研究中也比较常见。由于软、硬件结构的开放性,这种方案使用方便,编程相对简单,但是板卡体积较大,板卡、电机驱动器、电机之间的连线冗余,布线复杂。因此,设计一套软、硬件结构开放性好、结构简单、实时性好、开发、维护方便的控制系统对于微创手术机器人是非常必要的。
发明内容
本发明为解决现有微创手术机器人的控制系统软硬件开放性差、结构复杂、实时性不好、开发和维护不方便问题,进而提出一种体式微创手术机器人的控制系统。
本发明为解决上述问题采取的技术方案是:本发明包括硬件子系统和软件子系统,所述硬件子系统包括主控制台和从手机械臂,主控制台包括枢纽工控机、控制面板、脚踏开关、控制电路、第一主操作手、第二主操作手、显示器、3D显示系统和工业路由器,枢纽工控机由供电结构、第一数据接口、第二数据接口、第三数据接口和通信接口,控制面板和脚踏开关均通过控制电路与第一数据接口连接,供电接口与控制电路连接,第一主操作手与第二数据接口连接,第二主操作手与第三数据接口连接,通信接口通过工业路由器与从手机械臂连接,显示器与3D显示系统连接,3D显示系统的图像信号接收端与腹腔镜连接。
本发明的有益效果是:本发明结构简单,层次分明,布线简洁,扩展性好、开发与维护方便的控制系统。本发明的硬件子系统采用分布式的现场总线控制方式,布线简洁,便于调试与维护,系统安装成本低;软件子系统根据整个系统所要实现的功能,采用模块化编程,分块设计。整个控制系统结构清晰,层次分明,开发与维护方便,并且具有良好的可扩展性和可移植性。
附图说明
图1是本发明的硬件子系统结构示意图,图1中13-患者,14-手术器械,15-腹腔镜,16-手术器械,图2是本发明的软件子系统结构示意图。
具体实施方式
设备控制层19包括七个第一电机控制模块19-3、七个第一信息反馈模块19-4、九个第一编码器反馈模块19-5、三个第二电机控制模块19-7、三个第二信息反馈模块19-8、五个第二编码器反馈模块19-9、七个第三电机控制模块19-11、七个第三信息反馈模块19-12和九个第三编码器反馈模块19-13,七个第一电机控制模块19-3、三个第二电机控制模块19-7、七个第三电机控制模块19-11用于将来自核心控制层18的数据按照EtherCat协议转换成电机控制命令发送给机械臂关节驱动电机,带动第一机械臂关节10、第二机械臂关节11、第三机械臂关节12运动;七个第一信息反馈模块19-4、三个第二信息反馈模块19-8、七个第三信息反馈模块19-12用于读取机械臂关节驱动电机的运行状态及运行参数,并上传到核心控制层18进行处理;九个第一编码器反馈模块19-5、九个第三编码器反馈模块19-13用于将第一机械臂关节10和第三机械臂关节12各自的第一外置编码器104、第二外置编码器105、七个第三外置编码器107的读数上传到核心控制层18进行处理;五个第二编码器反馈模块19-9用于将第二机械臂关节11的第四外置编码器204、第五外置编码器205、三个第六外置编码器207的读数上传到核心控制层18进行处理。其它组成及连接关系与具体实施方式一或二相同。
硬件子系统实施例:
术前,医生根据手术需求,通过控制面板2上的按钮,进行参数设置,主要包括:主从比例设置、主从手对应关系设置,并通过控制电路4将控制信号传递给数据接口1-2供后续程序调用。医生根据3D显示系统8和显示器7传回的3D图像,控制第一主操作手5和第二主操作手6进行相应的手术动作,通过第二数据接口1-3、第三数据接口1-4将手部运动信息数据发送给枢纽工控机1。术中,当医生控制第一主操作手5和第二主操作手6运动到极限位置时,可以通过踩踏脚踏开关3,使得从手机械臂停止运动,调整第一主操作手5和第二主操作手6到合适的位置,再松开踏脚踏开关3,继续进行手术操作;而内窥镜切换脚踏开关可以在持镜臂和持械臂之间随意切换第一主操作手5和第二主操作手6的控制对象,这些控制信号同样通过控制电路4传递给枢纽工控机1的第一数据接口1-2进行处理。枢纽工控机1将第一数据接口1-2、第二数据接口1-3、第三数据接口1-4接收到的数据与控制算法相结合,计算出从手各个关节的运动信息,并通过通信接口1-5,经由路由器9发送给从手机械臂部分0-2。在由枢纽工控机1、工业路由器9和两个第一多轴控制器101、一个第二多轴控制器201组成的局域网中,数据通过各自不同的IP地址进行通信。因此,从主控制台0-1侧发送的第一分体式机械臂10、第二分体式机械臂11、第三分体是机械臂12的控制指令和数据,根据IP地址,被相应机械臂的第一多轴控制器101、第二多轴控制器201接收。第一多轴控制器101、第二多轴控制器201再对数据进行优化,发送到各自关节的驱动单元等。各个驱动单元等再将转换后的控制指令和运动数据,发送给直流电机等与编码器等组成的控制闭环,使直流电机等带动关节进行运动。这时,通过外置编码器等,驱动单元等能够实时地读取关节的角度值,并由上传到第一多轴控制器101、第二多轴控制器201,最终反馈给枢纽工控机1。同时,驱动单元还读取电机的状态、运动参数等信息,通过第一多轴控制器101、第二多轴控制器201反馈给枢纽工控机1进行处理。手术器械14,16通过各个关节的联动产生动作,这些动作图像和手术视野图像,经由腹腔镜15和3D图像显示系统8转换成3D图像显示在显示器7上,形成视觉闭环。
软件子系统实施例:
术前,医生根据手术需求对机器人系统进行设置,由参数配置模块17-1进行记录;术中,医生的一些特殊操作,如重新调整主操作手的位置,切换主操作手的控制对象,可以通过特定功能模块17-2进行记录,这些设置内容需要传给辅助控制模块18-4进行处理。这时,医生操作主操作手产生的运动信息,被主手数据采集模块进行记录。控制算法模块18-3,将主手采集模块、辅助控制模块、安全检测模块传递来的数据作为输入参数,运行相应的控制算法,并将结果按照不同的机械臂发送给对应的机械臂运动解算模块,每一个机械臂运动解算模块再根据对应机械臂的运动学模型进行运动学逆解计算。最终的计算结果在通信模块中被按照MODBUS协议进行打包,并发送给设备控制层19。每一个机械臂的电机控制模块19-3,19-7,19-11接收到来自核心控制层18相应机械臂的数据,并按照MODBUS协议进行解包,同时将提取出的控制指令和数据按照EtherCAT协议转换成电机控制命令发送给各自关节的驱动单元,再由驱动单元传送给控制电机,从而带动关节运动;同时,编码器反馈模块使外置编码器的读数能够实时地上传给核心控制层18。而每一个关节处的信息反馈模块19-4,19-8,19-12,能够实时地读取并上传电机的运行状态及运行参数。这些上传的数据,首先都要经过安全监测模块18-11进行安全性检测,确保读取的数据以及电机的运动状态和运行参数在正常范围之内,同时通过数据显示17-4,状态显示模块17-5显示系统的正常运行状态。一旦安全监测模块18-11检测到数据异常或电机状态异常,驱动单元立即停止电机运动,同时通过数据显示17-4,状态显示模块17-5显示系统处于异常运行状态,并利用数据记录模块17-3记录异常的代号,以便进行维护。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
价值度评估
技术价值
经济价值
法律价值
0 0 059.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:59.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【3 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间10 年】专利权的维持时间越长,其价值对于权利人而言越高。 尤其重要是,该专利 【权利转移1 次】、 都从侧面反应出该专利的技术、经济和法律价值。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
27 个月独立权利要求数量
1 个从属权利要求数量
1 个说明书页数
5 页实施例个数
1 个发明人数量
6 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
3 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 9.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
1 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
10法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...