




【中国发明,中国发明授权】一种光子轨道角动量本征态纠缠的探测装置及方法
有权-审定授权 中国
- 申请号:
- CN201710240197.X
- 专利权人:
- 哈尔滨工业大学
- 授权公告日/公开日:
- 2019.04.16
- 专利有效期:
- 2017.04.13-2037.04.13
- 技术分类:
- G01:测量;测试
- 转化方式:
- 转让
- 价值度指数:
-
- 57.0分
- 价格:
- 面议
发布人
哈尔滨工业大学
联系人何老师
-

- 13151263266

-

- 302910554
-

- 13151263266

- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201710240197.X
- 申请日
- 20170413
- 公开/公告号
- CN106940223A
- 公开/公告日
- 20170711
- 申请/专利权人
- [哈尔滨工业大学]
- 发明/设计人
- [张子静, 岑龙柱, 赵远, 张建东, 李硕, 闫林玉]
- 主分类号
- G01J11/00
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 黑龙江(23)
- 颁证日
- G06T1/00
- 代理人
- [毕雅凤]
摘要
一种光子轨道角动量本征态纠缠的探测装置及方法,涉及量子通信技术,为了满足光子轨道角动量本征态纠缠的探测需求。待测光子对中的一个光子入射至第一遮挡板,另一个光子入射至第二遮挡板,由第一遮挡板出射的光子经第一凸透镜聚焦到第一桶探测器,由第二遮挡板出射的光子经第二凸透镜聚焦到第二桶探测器,符合计数器用于对第一桶探测器及第二桶探测器在同一个光脉冲周期内同时探测到光子的次数进行计数。绘制符合计数次数随第二遮挡板旋转角度γ2变化曲线,计算该曲线可见度绘制符合计数次数随第一遮挡板旋转角度γ1变化曲线,计算该曲线可见度计算纠缠判据W,判定待测光子对是否为轨道角动量本征态纠缠态。适用于探测光子对。
法律状态
| 法律状态公告日 | 20230425 |
| 法律状态 | 专利申请权、专利权的转移 |
| 法律状态信息 | 专利权的转移 IPC(主分类):G01J 11/00 专利号:ZL201710240197X 登记生效日:20230413 变更事项:专利权人 变更前权利人:黑龙江省工业技术研究院 变更后权利人:黑龙江省工研院资产经营管理有限公司 变更事项:地址 变更前权利人:150000 黑龙江省哈尔滨市松北区中源大道14955号加速器9号楼 变更后权利人:150027 黑龙江省哈尔滨市高新技术产业开发区科技创新城创新创业广场9号楼中源大道14955号1单元412室 |
| 法律状态公告日 | 20210205 |
| 法律状态 | 专利申请权、专利权的转移 |
| 法律状态信息 | 专利权的转移 IPC(主分类):G01J 11/00 专利号:ZL201710240197X 登记生效日:20210126 变更事项:专利权人 变更前权利人:哈尔滨工业大学 变更后权利人:黑龙江省工业技术研究院 变更事项:地址 变更前权利人:150001 黑龙江省哈尔滨市南岗区西大直街92号 变更后权利人:150000 黑龙江省哈尔滨市松北区中源大道14955号加速器9号楼 |
| 法律状态公告日 | 20190416 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20170804 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):G01J 11/00 申请日:20170413 |
| 法律状态公告日 | 20170711 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
| 事务数据公告日 | 20230425 |
| 事务数据类型 | 专利申请权、专利权的转移 |
| 转让详情 | 专利权的转移 IPC(主分类):G01J 11/00 专利号:ZL201710240197X 登记生效日:20230413 变更事项:专利权人 变更前权利人:黑龙江省工业技术研究院 变更后权利人:黑龙江省工研院资产经营管理有限公司 变更事项:地址 变更前权利人:150000 黑龙江省哈尔滨市松北区中源大道14955号加速器9号楼 变更后权利人:150027 黑龙江省哈尔滨市高新技术产业开发区科技创新城创新创业广场9号楼中源大道14955号1单元412室 |
| 事务数据公告日 | 20210205 |
| 事务数据类型 | 专利申请权、专利权的转移 |
| 转让详情 | 专利权的转移 IPC(主分类):G01J 11/00 专利号:ZL201710240197X 登记生效日:20210126 变更事项:专利权人 变更前权利人:哈尔滨工业大学 变更后权利人:黑龙江省工业技术研究院 变更事项:地址 变更前权利人:150001 黑龙江省哈尔滨市南岗区西大直街92号 变更后权利人:150000 黑龙江省哈尔滨市松北区中源大道14955号加速器9号楼 |
权利要求
权利要求数量(6)
独立权利要求数量(1)
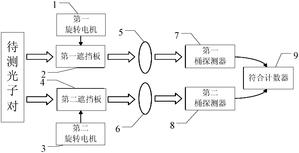
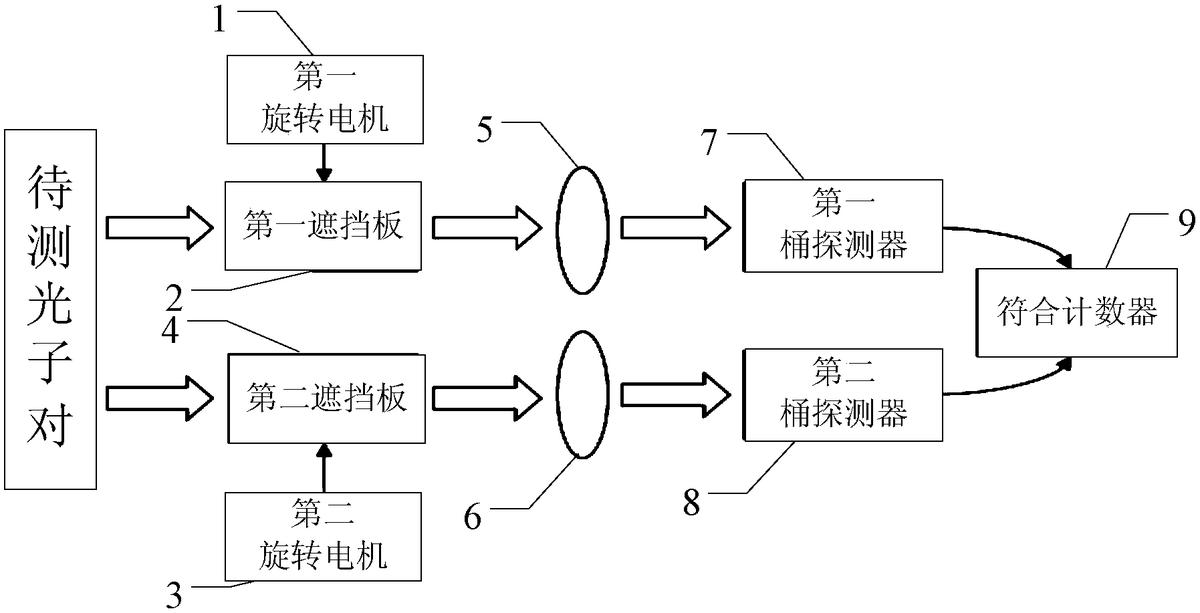
1.一种光子轨道角动量本征态纠缠的探测装置,其特征在于,包括第一旋转电机(1)、 第一遮挡板(2)、第二旋转电机(3)、第二遮挡板(4)、第一凸透镜(5)、第二凸透镜(6)、第一 桶探测器(7)、第二桶探测器(8)和符合计数器(9);
待测光子对中的一个光子入射至第一遮挡板(2),另一个光子入射至第二遮挡板(4), 第一旋转电机(1)控制第一遮挡板(2)的旋转,第二旋转电机(3)控制第二遮挡板(4)的旋 转,由第一遮挡板(2)出射的光子经第一凸透镜(5)聚焦到第一桶探测器(7),由第二遮挡板 (4)出射的光子经第二凸透镜(6)聚焦到第二桶探测器(8),符合计数器(9)用于对第一桶探 测器(7)及第二桶探测器(8)在同一个光脉冲周期内同时探测到光子的次数进行计数。
2.根据权利要求1所述的一种光子轨道角动量本征态纠缠的探测装置,其特征在于,所 述第一遮挡板(2)与第二遮挡板(4)的结构相同,均为圆形黑纸板,纸板周向均匀分布着2l 条相同长度的狭缝,狭缝的轴向为纸板的径向,狭缝延伸至纸板边缘。
3.根据权利要求2所述的一种光子轨道角动量本征态纠缠的探测装置,其特征在于,所 述圆形黑纸板的直径为20mm,狭缝的长度为5mm。
4.基于上述任意一项权利要求所述的一种光子轨道角动量本征态纠缠的探测装置的 探测方法,其特征在于,该方法包括以下步骤:
步骤一:第一旋转电机(1)控制第一遮挡板(2)保持不动,第二旋转电机(3)控制第二遮 挡板(4)以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次 数随第二遮挡板(4)旋转角度γ 2变化曲线,计算该曲线可见度 M为正数;
步骤二:第二旋转电机(3)控制第二遮挡板(4)保持不动,第一旋转电机(1)控制第一遮 挡板(2)以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次 数随第一遮挡板(2)旋转角度γ 1变化曲线,计算该曲线可见度
步骤三:根据公式(2)计算纠缠判据W,当W大于可分离态所能达到的最大值时,则判定 待测光子对轨道角动量本征态纠缠;
5.根据权利要求4所述的一种光子轨道角动量本征态纠缠的探测方法,其特征在于,所 述步骤一中计算符合计数次数随第二遮挡板(4)旋转角度γ 2变化曲线的曲线可见度 的 方法为:
其中, 和 分别为符合计数次数随第二遮挡板(4)旋转角度γ2变化曲线的峰 值和谷值;
所述步骤二中计算符合计数次数随第一遮挡板(2)旋转角度γ 1变化曲线的曲线可见度 的方法为:
其中, 和 分别为符合计数次数随第一遮挡板(2)旋转角度γ1变化曲线的峰 值和谷值。
6.根据权利要求4或5所述的一种光子轨道角动量本征态纠缠的探测方法,其特征在 于,所述可分离态所能达到的最大值为 当W大于该值时,则判定待测光子对轨道 角动量本征态纠缠。
1.一种光子轨道角动量本征态纠缠的探测装置,其特征在于,包括第一旋转电机(1)、第一遮挡板(2)、第二旋转电机(3)、第二遮挡板(4)、第一凸透镜(5)、第二凸透镜(6)、第一桶探测器(7)、第二桶探测器(8)和符合计数器(9);
待测光子对中的一个光子入射至第一遮挡板(2),另一个光子入射至第二遮挡板(4),第一旋转电机(1)控制第一遮挡板(2)的旋转,第二旋转电机(3)控制第二遮挡板(4)的旋转,由第一遮挡板(2)出射的光子经第一凸透镜(5)聚焦到第一桶探测器(7),由第二遮挡板(4)出射的光子经第二凸透镜(6)聚焦到第二桶探测器(8),符合计数器(9)用于对第一桶探测器(7)及第二桶探测器(8)在同一个光脉冲周期内同时探测到光子的次数进行计数。
2.根据权利要求1所述的一种光子轨道角动量本征态纠缠的探测装置,其特征在于,所述第一遮挡板(2)与第二遮挡板(4)的结构相同,均为圆形黑纸板,纸板周向均匀分布着2l条相同长度的狭缝,狭缝的轴向为纸板的径向,狭缝延伸至纸板边缘。
3.根据权利要求2所述的一种光子轨道角动量本征态纠缠的探测装置,其特征在于,所述圆形黑纸板的直径为20mm,狭缝的长度为5mm。
4.基于上述任意一项权利要求所述的一种光子轨道角动量本征态纠缠的探测装置的探测方法,其特征在于,该方法包括以下步骤:
步骤一:第一旋转电机(1)控制第一遮挡板(2)保持不动,第二旋转电机(3)控制第二遮挡板(4)以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次数随第二遮挡板(4)旋转角度γ2变化曲线,计算该曲线可见度M为正数;
步骤二:第二旋转电机(3)控制第二遮挡板(4)保持不动,第一旋转电机(1)控制第一遮挡板(2)以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次数随第一遮挡板(2)旋转角度γ1变化曲线,计算该曲线可见度
步骤三:根据公式(2)计算纠缠判据W,当W大于可分离态所能达到的最大值时,则判定待测光子对轨道角动量本征态纠缠;
W = vis γ 1 + vis γ 2 - - - ( 2 ) . ]]>
5.根据权利要求4所述的一种光子轨道角动量本征态纠缠的探测方法,其特征在于,所述步骤一中计算符合计数次数随第二遮挡板(4)旋转角度γ2变化曲线的曲线可见度的方法为:
vis γ 1 = max γ 2 - min γ 2 max γ 2 + min γ 2 - - - ( 3 - 1 ) ; ]]>
其中,和分别为符合计数次数随第二遮挡板(4)旋转角度γ2变化曲线的峰值和谷值;
所述步骤二中计算符合计数次数随第一遮挡板(2)旋转角度γ1变化曲线的曲线可见度的方法为:
vis γ 2 = max γ 1 - min γ 1 max γ 1 + min γ 1 - - - ( 3 - 2 ) ; ]]>
其中,和分别为符合计数次数随第一遮挡板(2)旋转角度γ1变化曲线的峰值和谷值。
6.根据权利要求4或5所述的一种光子轨道角动量本征态纠缠的探测方法,其特征在于,所述可分离态所能达到的最大值为当W大于该值时,则判定待测光子对轨道角动量本征态纠缠。
说明书
本发明涉及量子通信技术。
量子纠缠是微观领域一种典型的非经典效应,在量子信息学领域具有重要的应用价值。例如基于量子纠缠的量子通信技术被誉为绝对安全无法被窃听的通信技术。一个合格纠缠态的制备是保证类似应用正常工作的前提,这就需要一种可以对纠缠进行有效探测及检验的方法。基于光子轨道角动量本征态的纠缠是目前应用潜力极大的一类纠缠,因为光子轨道角动量本征态构成无穷多维希尔伯特空间,可以承载的信息量极大,而对于这类纠缠的探测及检验则变得至关重要。
本发明的目的是为了满足光子轨道角动量本征态纠缠的探测需求,从而提供一种光子轨道角动量本征态纠缠的探测装置及方法。
本发明所述的一种光子轨道角动量本征态纠缠的探测装置,包括第一旋转电机、第一遮挡板、第二旋转电机、第二遮挡板、第一凸透镜、第二凸透镜、第一桶探测器、第二桶探测器和符合计数器;
待测光子对中的一个光子入射至第一遮挡板,另一个光子入射至第二遮挡板,第一旋转电机控制第一遮挡板的旋转,第二旋转电机控制第二遮挡板的旋转,由第一遮挡板出射的光子经第一凸透镜聚焦到第一桶探测器,由第二遮挡板出射的光子经第二凸透镜聚焦到第二桶探测器,符合计数器用于对第一桶探测器及第二桶探测器在同一个光脉冲周期内同时探测到光子的次数进行计数。
优选的是,所述第一遮挡板与第二遮挡板的结构相同,均为圆形黑纸板,纸板周向均匀分布着2l条相同长度的狭缝,狭缝的轴向为纸板的径向,狭缝延伸至纸板边缘。
优选的是,所述圆形黑纸板的直径为20mm,狭缝的长度为5mm。
本发明所述的一种光子轨道角动量本征态纠缠的探测方法,该方法包括以下步骤:
步骤一:第一旋转电机控制第一遮挡板保持不动,第二旋转电机控制第二遮挡板以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次数随第二遮挡板旋转角度γ2变化曲线,计算该曲线可见度M为正数;
步骤二:第二旋转电机控制第二遮挡板保持不动,第一旋转电机控制第一遮挡板以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次数随第一遮挡板旋转角度γ1变化曲线,计算该曲线可见度
步骤三:根据公式(2)计算纠缠判据W,当W大于可分离态所能达到的最大值时,则判定待测光子对轨道角动量本征态纠缠;
优选的是,所述步骤一中计算符合计数次数随第二遮挡板旋转角度γ2变化曲线的曲线可见度的方法为:
其中,和分别为符合计数次数随第二遮挡板旋转角度γ2变化曲线的峰值和谷值。
所述步骤二中计算符合计数次数随第一遮挡板旋转角度γ1变化曲线的曲线可见度的方法为:
其中,和分别为符合计数次数随第一遮挡板旋转角度γ1变化曲线的峰值和谷值。
优选的是,所述可分离态所能达到的最大值为当W大于该值时,则判定待测光子对轨道角动量本征态纠缠。
本发明可以对具有特定形式波函数的光子轨道角动量本征态纠缠进行探测及验证,所选取的纠缠判据可以通过符合计数率曲线的可见度求得,当该纠缠判据数值超过可分离态所能达到的最大值时,即可证明被测信号为纠缠态。本发明的实验装置及数据处理方法简单。
图1是具体实施方式一所述的一种光子轨道角动量本征态纠缠的探测装置的结构示意图;
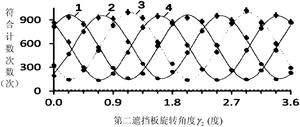
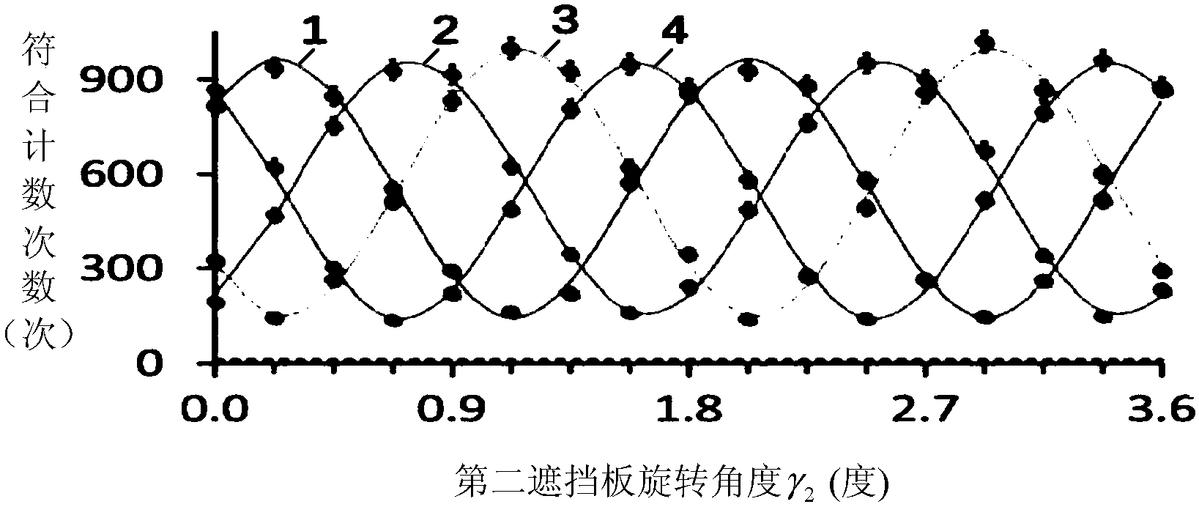
图2是具体实施方式六中的符合计数次数随遮挡板旋转角度变化曲线图。
具体实施方式一:结合图1具体说明本实施方式,本实施方式所述的一种光子轨道角动量本征态纠缠的探测装置,包括第一旋转电机1、第一遮挡板2、第二旋转电机3、第二遮挡板4、第一凸透镜5、第二凸透镜6、第一桶探测器7、第二桶探测器8和符合计数器9;
待测光子对中的一个光子入射至第一遮挡板2,另一个光子入射至第二遮挡板4,由第一遮挡板2出射的光子经第一凸透镜5聚焦到第一桶探测器7,第一旋转电机1控制第一遮挡板2的旋转,第二旋转电机3控制第二遮挡板4的旋转,由第二遮挡板4出射的光子经第二凸透镜6聚焦到第二桶探测器8,符合计数器9用于对第一桶探测器7及第二桶探测器8在同一个光脉冲周期内同时探测到光子的次数进行计数。
第一桶探测器7和第二桶探测器8,接收到光子后会向符合计数器9输送电脉冲,当符合计数器9同一个光脉冲周期内同时接收到了分别由第一桶探测器7及第二桶探测器8传来的电脉冲则视为一次符合计数。
待测光子对为空间上分离的两个光子,两个光子分别携带拓扑核数为l和-l的轨道角动量,l的大小已知,若两光子处于可分离态,则其波函数为:
若两光子波函数无法写为(1)式的形式,则它们是纠缠的,其中|a|2+|b|2=1,|c|2+|d|2=1,和均为原始波函数可分离态展开式的相位参量。
具体实施方式二:本实施方式是对具体实施方式一所述的一种光子轨道角动量本征态纠缠的探测装置作进一步说明,本实施方式中,第一遮挡板2与第二遮挡板4的结构相同,均为圆形黑纸板,纸板周向均匀分布着2l条相同长度的狭缝,狭缝的轴向为纸板的径向,狭缝延伸至纸板边缘。
狭缝的条数由待测光子所携带的拓扑核数l决定,狭缝的条数为光子所携带的拓扑核数的2倍。
具体实施方式三:本实施方式是对具体实施方式二所述的一种光子轨道角动量本征态纠缠的探测装置作进一步说明,本实施方式中,所述圆形黑纸板的直径为20mm,狭缝的长度为5mm。
待测光子能通过遮挡板的概率随着遮挡板的旋转角度成周期性变化。
具体实施方式四:基于具体实施方式三所述的一种光子轨道角动量本征态纠缠的探测装置的探测方法,该方法包括以下步骤:
步骤一:第一旋转电机1控制第一遮挡板2保持不动,第二旋转电机3控制第二遮挡板4以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次数随第二遮挡板4旋转角度γ2变化曲线,计算该曲线可见度M为正数;
步骤二:第二旋转电机3控制第二遮挡板4保持不动,第一旋转电机1控制第一遮挡板2以固定角度间隔步进,每步进一次统计M分钟内的符合计数次数,绘制符合计数次数随第一遮挡板2旋转角度γ1变化曲线,计算该曲线可见度
步骤三:根据公式(2)计算纠缠判据W,当W大于可分离态所能达到的最大值时,则判定待测光子对轨道角动量本征态纠缠;
具体实施方式五:本实施方式是对具体实施方式四所述的一种光子轨道角动量本征态纠缠的探测方法作进一步说明,本实施方式中,步骤一中计算符合计数次数随第二遮挡板4旋转角度γ2变化曲线的曲线可见度的方法为:
其中,和分别为符合计数次数随第二遮挡板4旋转角度γ2变化曲线的峰值和谷值。
所述步骤二中计算符合计数次数随第一遮挡板2旋转角度γ1变化曲线的曲线可见度的方法为:
其中,和分别为符合计数次数随第一遮挡板2旋转角度γ1变化曲线的峰值和谷值。
具体实施方式六:结合图2具体说明本实施方式,本实施方式是对具体实施方式四所述的一种光子轨道角动量本征态纠缠的探测方法作进一步说明,本实施方式中,所述可分离态所能达到的最大值为当W大于该值时,则判定待测光子对轨道角动量本征态纠缠。
对于波函数形式为(1)式的两光子,纠缠判据W大小为
当时,W取到最大值当实际探测得W大于该值,则可判定待测光子对轨道角动量本征态纠缠。
采用本发明的装置对波函数为的光子对进行探测。第一遮挡板2和第二遮挡板4由激光切割黑纸板制成,狭缝数量为20,每个狭缝宽度1mm,长度5mm。第一凸透镜5、第二凸透镜6的焦距均为1000mm。M取值为10,所测得的符合计数次数随遮挡板旋转角度的变化曲线如图2所示。图中曲线1、2、3、4分别为固定γ1角度为0°、0.45°、0.9°、1.35°,然后以0.225°的步长增大γ2所测得的曲线。可以看到,符合计数次数仅与γ1、γ2之差有关,说明所测光子对明显得非线性关联。由曲线计算获得则纠缠判据W=1.55>1.21。可以判定待测光子对光子轨道角动量本征态纠缠。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
价值度评估
技术价值
经济价值
法律价值
0 0 057.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:57.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间9 年】专利权的维持时间越长,其价值对于权利人而言越高。 尤其重要是,该专利 【权利转移2 次】、 都从侧面反应出该专利的技术、经济和法律价值。
技术价值 29.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
24 个月独立权利要求数量
1 个从属权利要求数量
5 个说明书页数
4 页实施例个数
1 个发明人数量
6 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 9.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
2 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
9法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...