

【中国发明,中国发明授权】一种用于铁塔自动检修攀爬机器人的末端夹持装置
有权-审定授权 中国
- 申请号:
- CN201610131712.6
- 专利权人:
- 四川大学
- 授权公告日/公开日:
- 2018.04.24
- 专利有效期:
- 2016.03.08-2036.03.08
- 技术分类:
- B25:手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手
- 转化方式:
- 转让
- 价值度指数:
-
- 57.0分
- 价格:
- 面议
发布人
知识产权运营中心
联系人IP先生
-

- 15113831943
-

- 9411117419@qq.com
-

- 941117419
-

- szhf1188(加微信)
-

- 深圳市南山区粤海街道100号
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201610131712.6
- 申请日
- 20160308
- 公开/公告号
- CN105690414A
- 公开/公告日
- 20160622
- 申请/专利权人
- [四川大学]
- 发明/设计人
- [陆小龙, 赵世平, 宋国堃, 刘晓宇, 王越, 夏京川, 祁正兴]
- 主分类号
- B25J15/08
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 四川(51)
- 颁证日
- G06T1/00
- 代理人
- [吕建平]
摘要
本发明提供了一种用于铁塔自动检修攀爬机器人机械手装置,包括两副相对设置结构相同的手爪张合机构和驱使两副手爪张合机构抱持夹紧塔架构件结构相同的两副抱持夹紧机构,两副手爪张合机构分别通过联接板固定在两副手爪抱持夹紧机构的螺母滑块上,通过分别控制手爪张合机构和抱持夹紧机构的驱动电机旋转方向和速度,使手爪张合机构的指爪抱持夹紧塔架角钢。本发明不仅能够实现从不同方向对角钢的可靠夹持,而且能实现对截面为圆形、矩形、工字形等杆件的可靠夹持,从而使得机器人既能够在由角钢组成的塔架空间攀爬,也能够在由其它截面形状的构件组成的塔架结构中自由攀爬,携带检修维护设备完成各项检修任务。
法律状态
| 法律状态公告日 | 20180424 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20160720 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):B25J 15/08 申请日:20160308 |
| 法律状态公告日 | 20160622 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
权利要求
权利要求数量(10)
独立权利要求数量(5)
1.一种用于铁塔自动检修攀爬机器人的末端夹持装置,包括各为两副相对 设置结构相同的手爪张合机构和驱使手爪张合机构抱持夹紧塔架构件的抱持夹 紧机构;所述抱持夹紧机构包括第一机构架(4),安装在第一机构架(4)上的 第一驱动电机(1)、与第一驱动电机轴联接的第一传动丝杆(7)和与第一传动 丝杆匹配构成螺纹传动副的第一螺母滑块,所述第一螺母滑块与设置在第一机构 架上的导轨构成滑动副;所述手爪张合机构包括由两支撑板(14)构成的第二机 构架,安装在第二机构架上的第二驱动电机(13)、与第二驱动电机轴联接的第 二传动丝杆(27)、与第二传动丝杆匹配构成螺纹传动副的第二螺母滑块(26)、 与第二传动螺母滑块联接的联接组件和两个相对设置与联接组件铰接的手爪,两 个手爪通过与第二机构架支撑板上的弧形滑槽(16)相配的导向销柱(20)安装 在支撑板上,所述第二机构架通过联接构件(10)固定安装在抱持夹紧机构的第 一螺母滑块上。
2.根据权利要求1所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于抱持夹紧机构中的所述第一螺母滑块为组合结构件,由滑块(3)和嵌置 在滑块安装孔中的螺母(8)构成。
3.根据权利要求1所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于两副手爪张合机构相对错位设置,使得机器人在垂直或倾斜于地面的构件 上攀爬时,易于达到力矩平衡,确保机器人的可靠附着。
4.根据权利要求1或2或3所述的铁塔自动检修攀爬机器人的末端夹持装 置,其特征在于所述联接组件由中间体(23)和两个拉杆(24)构成,手爪的一 端与中间体通过销柱连接,两个拉杆的一端与中间体两侧铰链接,另一端与第二 螺母滑块联接。
6.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于所述手爪为组合件,由指爪(17)和与指爪内侧滑槽滑动配合的指爪滑块 (22)构成,指爪滑块的一端通过铰链与联接组件中间体(23)联接,指爪通过 销柱(20)与第二机构架支撑板上的弧形滑槽(16)相配的导向销柱(20)安装 在支撑板上。
7.根据权利要求6所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于所述指爪(17)的工作面上装有橡胶垫层(18),用于增大指爪夹紧构件 时的摩擦力。
8.根据权利要求7所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于所述橡胶垫层中嵌入有电磁铁(21),用于在张合机构完全展开时,吸附 角钢直平面。
5.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于所述联接组件的两个拉杆(24)与第二传动丝杆(27)安装支座(25)两 侧的导向槽匹配构成导向移动副。
9.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于所述中间体(23)上安装有红外传感器,用于提高手爪夹持角钢的效率。
10.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特 征在于所述联接构件(10)为联接板,通过螺钉件固定在第一螺母滑块上,构成 第二机构架的两支撑板(14)固定在联接板的两侧。
1.一种用于铁塔自动检修攀爬机器人的末端夹持装置,包括各为两副相对设置结构相同的手爪张合机构和驱使手爪张合机构抱持夹紧塔架构件的抱持夹紧机构;所述抱持夹紧机构包括第一机构架(4),安装在第一机构架(4)上的第一驱动电机(1)、与第一驱动电机轴联接的第一传动丝杆(7)和与第一传动丝杆匹配构成螺纹传动副的第一螺母滑块,所述第一螺母滑块与设置在第一机构架上的导轨构成滑动副;所述手爪张合机构包括由两支撑板(14)构成的第二机构架,安装在第二机构架上的第二驱动电机(13)、与第二驱动电机轴联接的第二传动丝杆(27)、与第二传动丝杆匹配构成螺纹传动副的第二螺母滑块(26)、与第二传动螺母滑块联接的联接组件和两个相对设置与联接组件铰接的手爪,两个手爪通过与第二机构架支撑板上的弧形滑槽(16)相配的导向销柱(20)安装在支撑板上,所述第二机构架通过联接构件(10)固定安装在抱持夹紧机构的第一螺母滑块上。
2.根据权利要求1所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于抱持夹紧机构中的所述第一螺母滑块为组合结构件,由滑块(3)和嵌置在滑块安装孔中的螺母(8)构成。
3.根据权利要求1所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于两副手爪张合机构相对错位设置,使得机器人在垂直或倾斜于地面的构件上攀爬时,易于达到力矩平衡,确保机器人的可靠附着。
4.根据权利要求1或2或3所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于所述联接组件由中间体(23)和两个拉杆(24)构成,手爪的一端与中间体通过销柱连接,两个拉杆的一端与中间体两侧铰链接,另一端与第二螺母滑块联接。
5.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于所述联接组件的两个拉杆(24)与第二传动丝杆(27)安装支座(25)两侧的导向槽匹配构成导向移动副。
6.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于所述手爪为组合件,由指爪(17)和与指爪内侧滑槽滑动配合的指爪滑块(22)构成,指爪滑块的一端通过铰链与联接组件中间体(23)联接,指爪通过销柱(20)与第二机构架支撑板上的弧形滑槽(16)相配的导向销柱(20)安装在支撑板上。
7.根据权利要求6所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于所述指爪(17)的工作面上装有橡胶垫层(18),用于增大指爪夹紧构件时的摩擦力。
8.根据权利要求7所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于所述橡胶垫层中嵌入有电磁铁(21),用于在张合机构完全展开时,吸附角钢直平面。
9.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于所述中间体(23)上安装有红外传感器,用于提高手爪夹持角钢的效率。
10.根据权利要求4所述的铁塔自动检修攀爬机器人的末端夹持装置,其特征在于所述联接构件(10)为联接板,通过螺钉件固定在第一螺母滑块上,构成第二机构架的两支撑板(14)固定在联接板的两侧。
说明书
本发明涉及一种为铁塔自动检修攀爬机器人定制的机械手装置,属机器人技术领域。
技术背景
高压输电线路是电力系统运行的主动脉,其能否安全运行直接关系到供电的稳定性和可靠性。作为输电线路的主要组成部分,电力铁塔及其附件长期暴露在野外,不仅要承受固有的机械载荷和电力负荷的内部压力,而且还要经受自然环境的各种侵害,以及鸟害的威胁。随着时间的日积月累,势必造成线路上杆塔及其附件出现各种故障。如不及时给予合理的维护,原本微小的破损和缺陷就可能扩大,最终导致严重事故,造成大面积的停电和巨大的经济损失。因此,需要定期对输电杆塔及其附件进行巡检,及时发现设备缺陷及线路安全隐患,并根据缺陷的轻重缓急,给予合理的维护,从而确保电力系统的安全、可靠运行。
目前国内高压输电线路的检修、维护基本上采用人工登塔作业的方式,完成相应的任务,这不仅大量消耗检修人员的体力,影响工作效率,也极不安全。电力部门迫切需要能取代人力进行铁塔检修、维护的自动化设备——铁塔攀爬机器人,以此减轻工人的劳动强度,降低触电和高空坠落的危险,而且设备可以在不影响供电的情况下进行带电作业,提高检修、维护的效率和质量。利用铁塔攀爬机器人完成对铁塔等塔架的检修、维护,机器人需具备在铁塔上自由攀爬移动的能力,而现有技术至今不能提供能够攀爬铁塔机器人的主要原因,是没有开发出能够从不同方向对不同规格角钢进行可靠夹持的机械手装置。因此尽快开发出夹持力大、结构紧凑、适应性强的机械手装置以装备机器人,实现对高压输电线路铁塔的自动化检修、维护,是所述领域的科技工作者共同面临的重要课题。
本发明所要解决的技术问题是提供一种用于铁塔自动检修攀爬机器人的末端夹持机构。本发明要求机器人能够在铁塔三维空间外表面自由攀爬移动,利用携带的检修设备代替线路工人完成各项任务,如:鸟巢清除、绝缘子清洗、螺栓紧固、金具损伤检测等。为此该机器人的末端机械手不仅要能实现对不同规格角钢的可靠夹持,而且还能从不同方向对角钢进行可靠夹持,以确保机器人能够在铁塔外表面自由攀爬移动。
为达到上述目的,本发明的技术解决方案为:
用于铁塔自动检修攀爬机器人机械手装置,包括各为两副相对设置结构相同的手爪张合机构和驱使手爪张合机构抱持夹紧塔架构件的抱持夹紧机构;所述抱持夹紧机构的构成包括第一机构架,安装在第一机构架上的第一驱动电机、与第一驱动电机轴联接的第一传动丝杆和与第一传动丝杆匹配构成螺纹传动副的第一螺母滑块,所述第一螺母滑块与设置在第一机构架上的导轨构成滑动副;所述手爪张合机构的构成包括由两支撑板构成的第二机构架,安装在第二机构架上的第二驱动电机、与第二驱动电机轴联接的第二传动丝杆、与第二传动丝杆匹配构成螺纹传动副的第二螺母滑块、与第二传动螺母滑块联接的联接组件和两个相对设置与联接组件铰接的手爪,两个手爪通过与第二机构架支撑板上的弧形滑槽相配的导向销柱安装在支撑板上,所述第二机构架通过联接构件固定安装在抱持夹紧机构的第一螺母滑块上。
在上述技术方案中,构成手爪抱持夹紧机构的所述第一螺母滑块,优先考虑设计成组合结构件,由滑块和嵌置在滑块安装孔中的螺母构成。
在上述技术方案的抱持夹紧机构中,设置在第一机构架上的所述导轨可以为矩形导轨、圆柱导轨、燕尾槽导轨中的任何一种。
在上述技术方案中,两副手爪张合机构优先采取相对错位设置,使机器人在垂直或倾斜于地面的构件上攀爬时,易于达到力矩平衡,确保机器人的可靠附着。
在上述技术方案中,所述手爪张合机构的联接组件,优先考虑设计成由中间体和两个拉杆构成,手爪的一端与所述中间体通过销柱连接,两个拉杆的一端与中间体两侧铰链,另一端与第二螺母滑块联接。进一步地,两个拉杆与第二传动丝杆安装支座两侧的导向槽匹配构成导向移动副。
在上述技术方案中,所述手爪为组合件,由指爪和与指爪内侧滑槽滑动配合的指爪滑块构成,指爪滑块的一端通过铰链与联接组件中间体联接,指爪通过导向销柱与第二机构架支撑板上的弧形滑槽相配的销柱安装在支撑板上。进一步地,指爪的工作面上设置橡胶垫层,以增大指爪夹紧构件时的摩擦力。再进一步地,所述橡胶垫层中最好嵌入电磁铁,用于张合机构在完全展开时,吸附角钢直平面。
在上述技术方案中,可考虑在所述手爪张合机构的中间体上安装红外传感器,以提高手爪夹持角钢的效率。
在上述技术方案中,所述联接构件为联接板,联接板通过螺钉件固定在抱持夹紧机构的第一螺母滑块上,构成手爪张合机构第二机构架的两支撑板固定在联接板的两侧,将手爪张合机构和手爪抱持夹紧机构联接为一体。
本发明提供的用于铁塔自动检修攀爬机器人机械手装置,为了实现从多个方向对塔架角钢的牢固夹持,提供足够大的夹持力,此末端手爪张合机构采用了仿生学设计,借鉴了人类手部虎口的张合动作,利用电机将力传递给张合机构丝杆,螺母通过螺纹与丝杆连接,螺母两侧与拉杆通过销柱联接,拉杆通过丝杆支座的导向槽,与中间体通过销柱联接,两个手爪安置于两支撑板中间,并通过销柱与支撑板联接,销柱可以在支撑板上的弧形滑槽内滑动,手爪的指爪内侧开有导向槽,指爪滑块可以在指爪的导向槽内运动,指爪滑块与中间体通过销柱铰链相联接。当手爪张合电机转动时,螺母在丝杆带动下前后运动,螺母带动拉杆在丝杆支座导向槽内前后移动,拉杆伸缩带动中间块沿丝杆轴方向移动,指爪滑块伸缩推动指爪以销柱为轴旋转,并沿弧形滑槽移动,从而使得手爪张合机构两手爪工作面的夹角可以在0°到180°之间变化。
本发明提供的用于铁塔自动检修攀爬机器人机械手装置,两副手爪张合机构通过其第二机构架、联接件固置在抱持夹紧机构的第一螺母滑块上,通过控制两副抱持夹紧机构的第一驱动电机的旋转速度和方向,使得两副手爪张合机构沿抱持夹紧机构的导轨移动,从而既可以同步实现对角钢的抱紧和松开,也可以单独移动,增大机械手夹持杆件的灵活性,从而实现对不同规格角钢的可靠夹持。
本发明的末端夹持机构具有结构紧凑、夹紧力大,重量轻,可从多个方向实现对不同规格角钢的可靠夹持,可以确保铁塔攀爬机器人可靠附着在铁塔表面,从而实现在铁塔三维空间自由攀爬,代替工人完成相应检修任务。
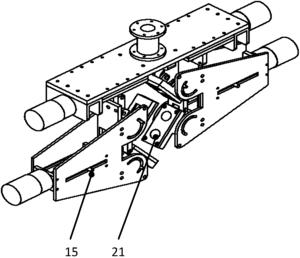
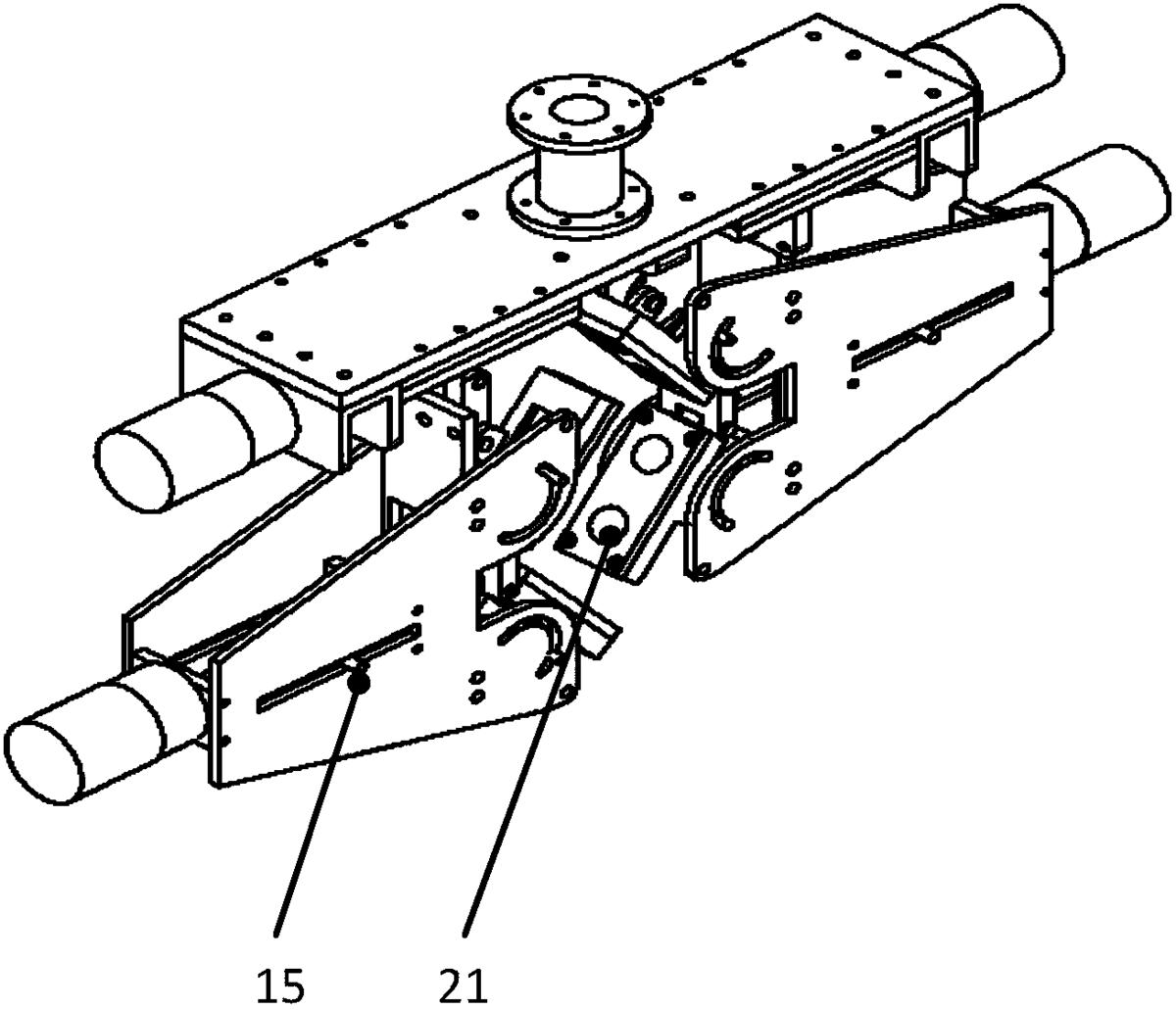
附图1是铁塔攀爬机器人末端执行机构的立体结构示意图。
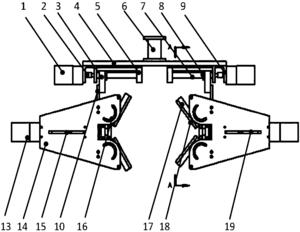
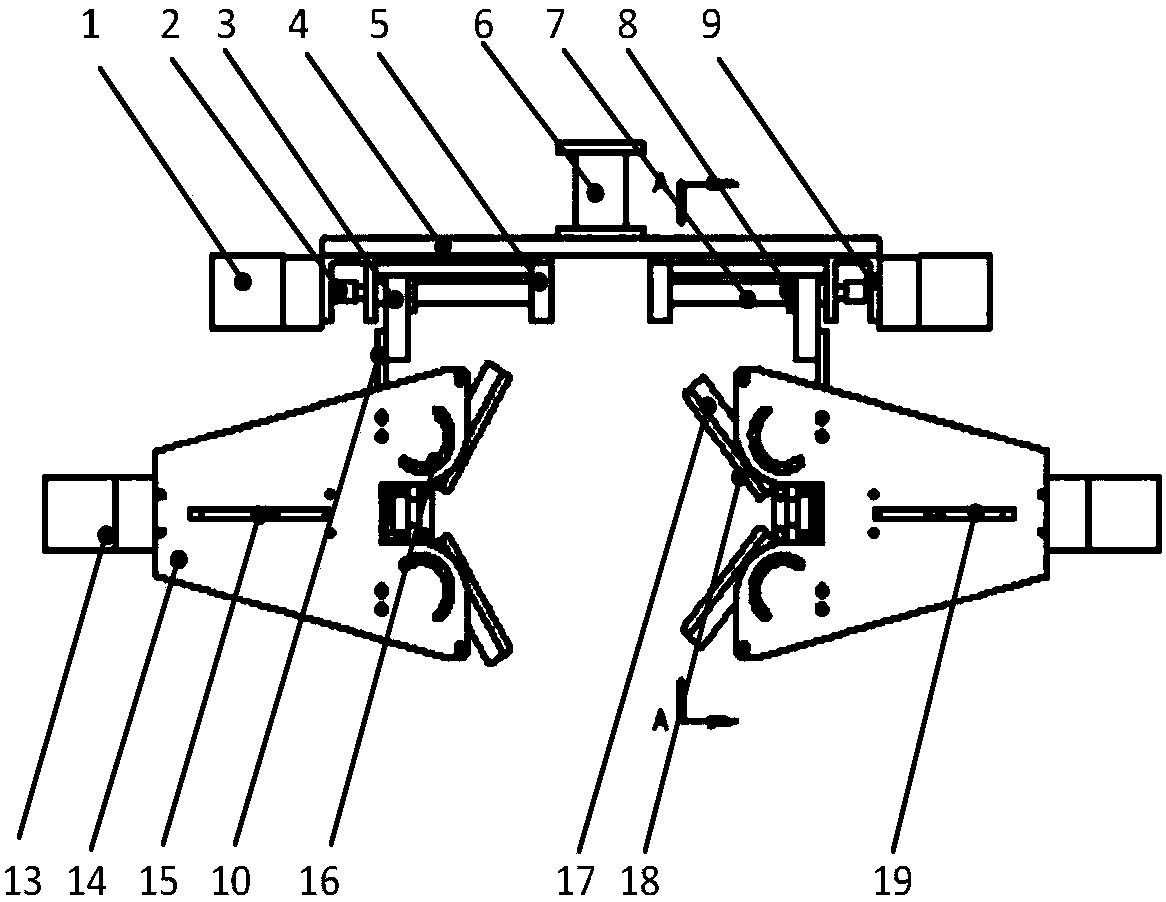
附图2-1是铁塔攀爬机器人末端执行机构的主视结构示意图。
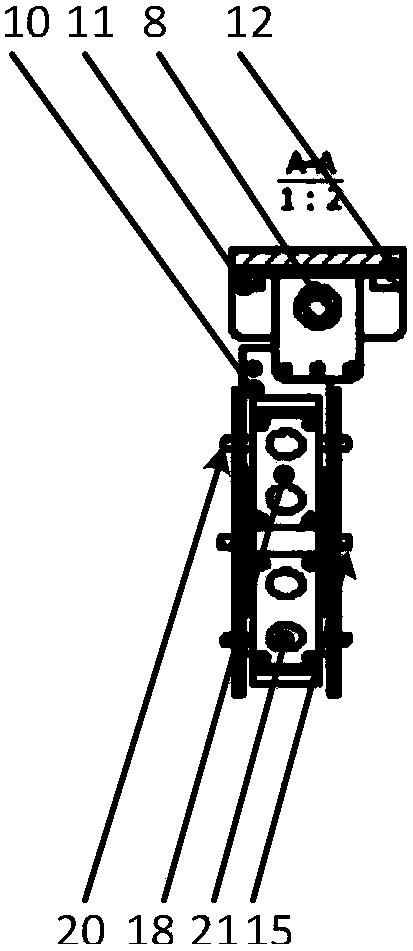
附图2-2是附图2-1中A-A向结构示意图。
附图2-3是铁塔攀爬机器人末端执行机构的俯视结构示意图。
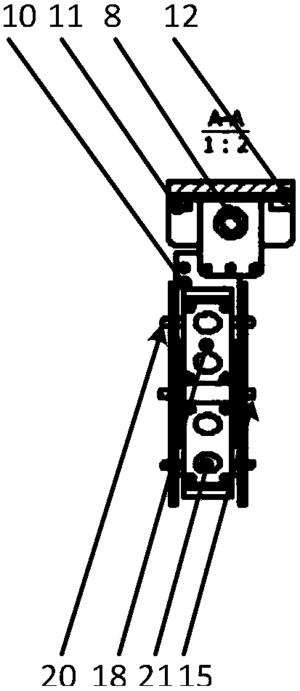
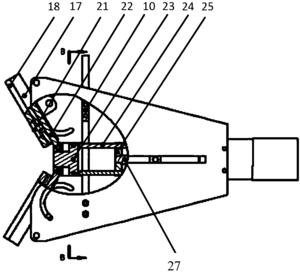
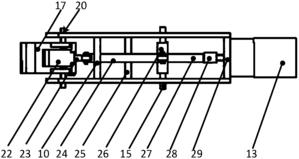
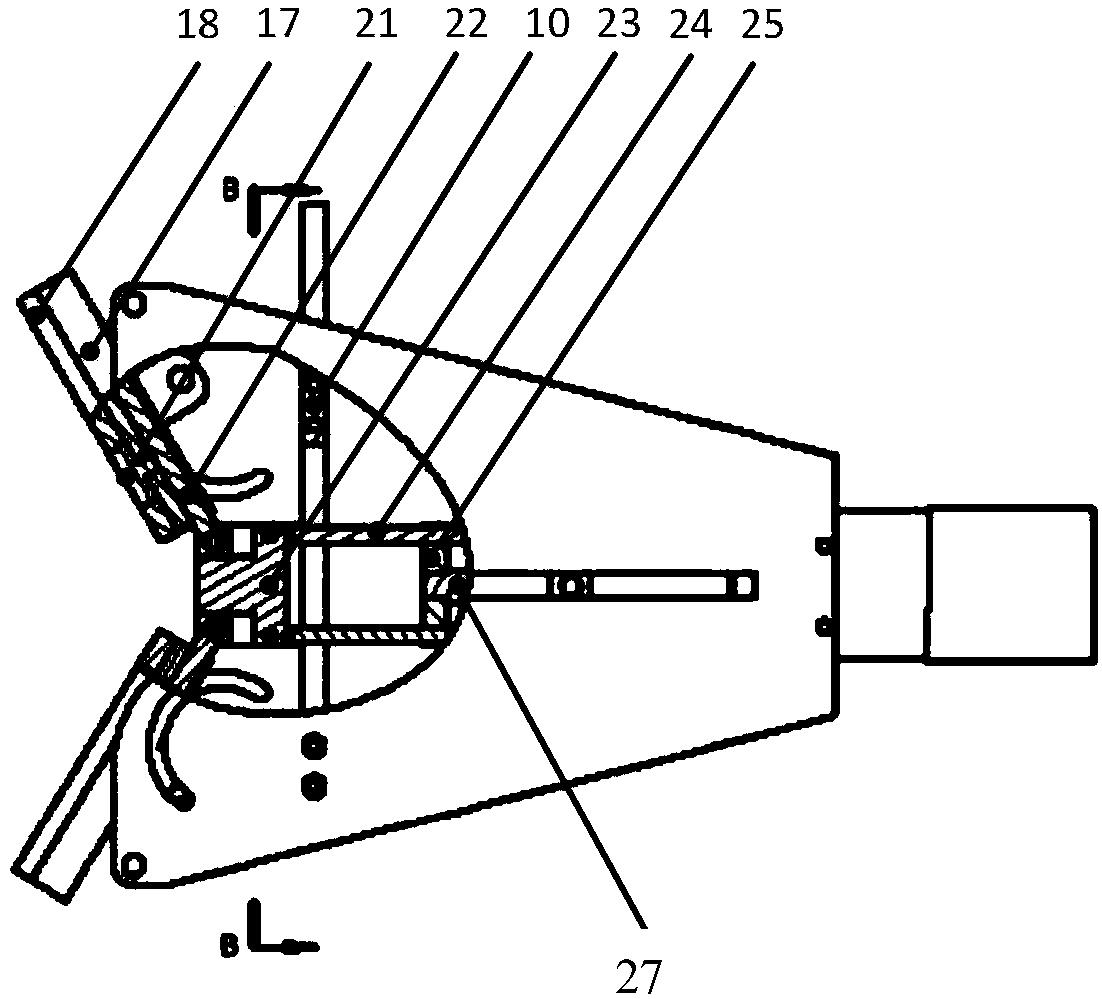
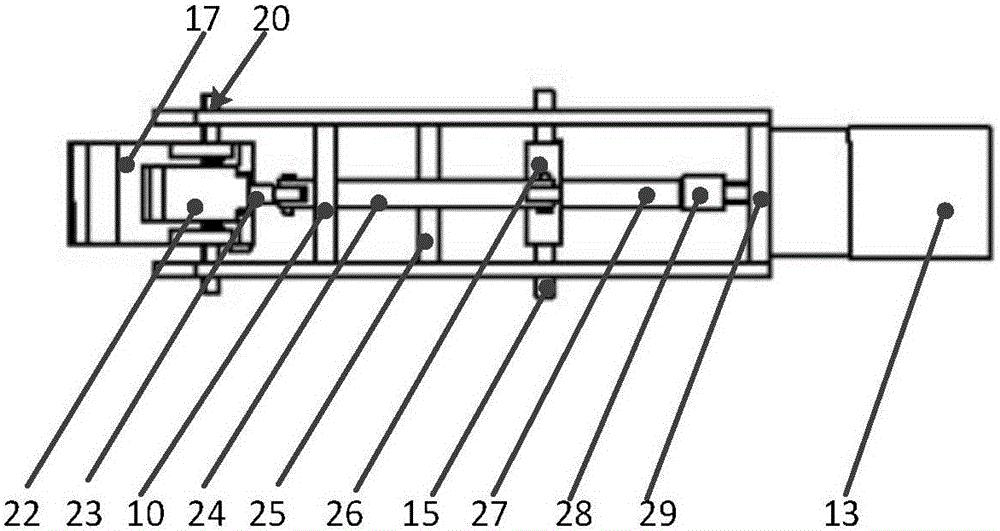
附图3-1是本发明的机械手装置的手爪张合机构的主视结构示意图。
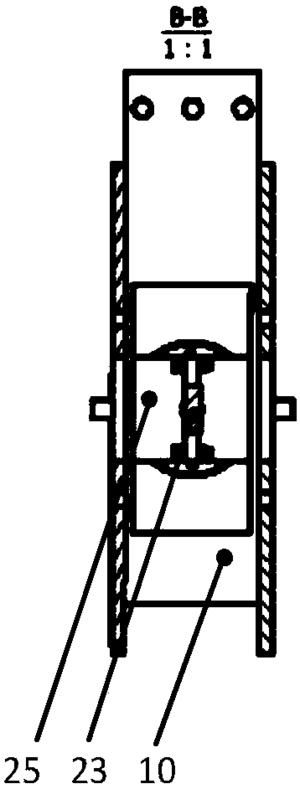
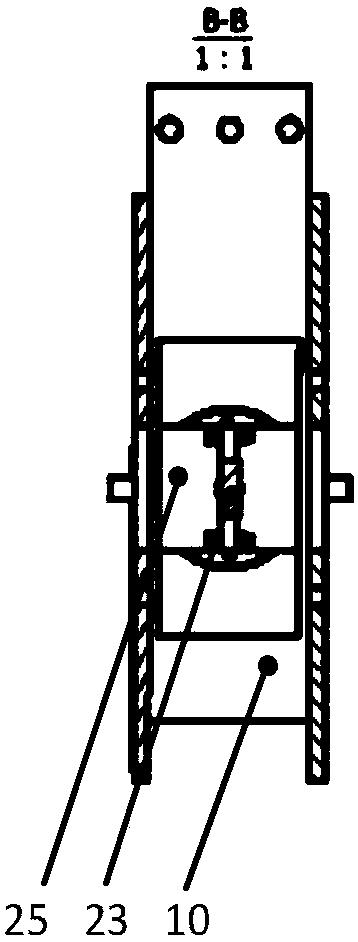
附图3-2是附图3-1中B-B向结构示意图。
附图3-3是手爪张合机构的俯视结构示意图。
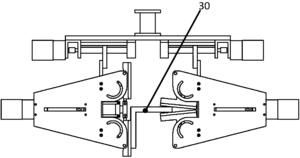
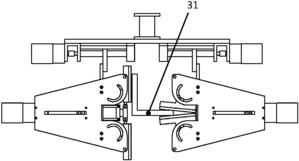
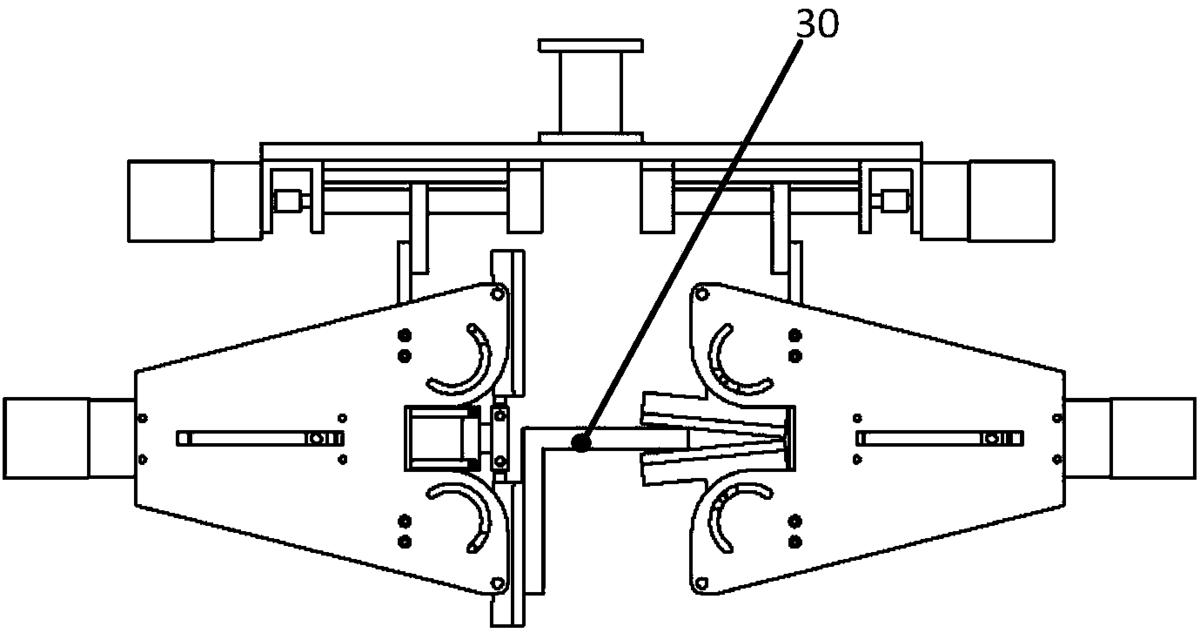
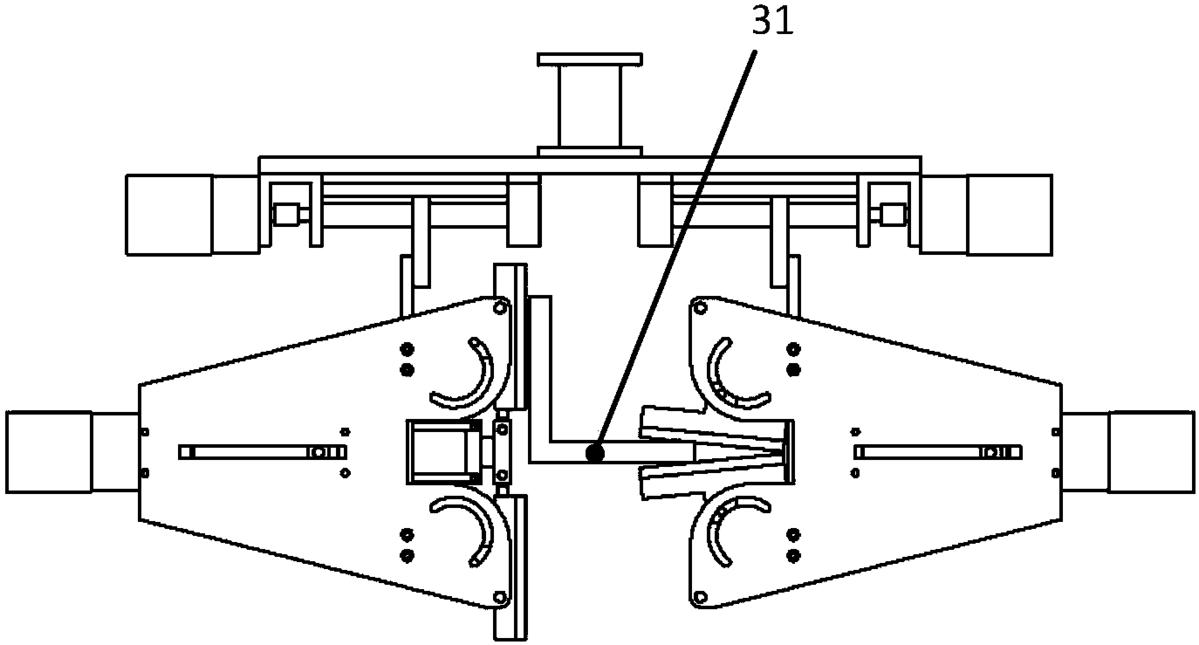
附图4-1和附图4-2是本发明的机械手装置对不同摆放形式的角钢的夹持示意图。
附图5是本发明的机械手装置夹持圆杆的示意图。
附图6是本发明的机械手装置夹持槽钢的示意图。
附图7是本发明的机械手装置夹持工字钢的示意图。
在上述附图中,各图示标号所标识的对象为:1-第一驱动电机;2-联轴器;3-滑块;4-第一机构架;5-支座;6-法兰盘;7-第一传动丝杆;8-螺母;9-第一驱动电机支座;10-联接板;11-导轨盖板;12-导轨支撑块;13-第二驱动电机;14-支撑板;15-导向柱;16-弧形滑槽;17-指爪;18-橡胶垫层;19-导向槽;20-导向销柱;21-电磁铁;22-指爪滑块;23-中间体;24-拉杆;25-第二传动丝杆支座;26-第二螺母滑块;27-第二传动丝杆;28-联轴器;29-第二驱动电机支座;30-角钢1;31-角钢2;32-圆形截面杆件;33-槽钢;34-工字钢。
下面结合附图说明给出本发明的一个实施例,通过实施例对本发明作进一步的说明。需要特别指出的是,本发明的具体实施方式不限于实施例所描述的形式。
主要包括装置机架、两副相对交错设置的手爪张合机构和驱使手爪张合机构的两副手爪抱持夹紧塔架构件的夹紧机构。
驱使两副手爪张合机构抱持夹紧塔架构件的抱持夹紧机构,其结构如附图2-1、2-2和2-3所示,两副抱持夹紧机构结构相同,对称布局,由第一机构架4安装在第一机构架上的第一驱动电机支座9、导轨支撑块12、导轨盖板11,安装在第一驱动电机支座上的第一驱动电机1,与第一驱动电机输出轴联接的第一传动丝杆7和第一螺母滑块构成,第一螺母滑块为组合结构件,由滑块3和嵌置在滑块安装孔中的螺母8构成,螺母8与第一传动丝杆匹配构成螺纹传动副,滑块与安装在导轨支撑块12上的导轨构成导轨滑动副。
手爪张合机构的结构如附图1至附图3-3所示,两副手爪张合机构的结构相同,通过联接板10与抱持夹紧机构滑块3固联,相对错位设置,使得机器人在垂直或倾斜于地面的构件上攀爬时,易于达到力矩平衡,从而提高夹持的可靠性。手爪张合机构的构成,包括由支撑板14构成的第二机构架,安装在两支撑板中间的第二驱动电机支座29、第二传动丝杆支座25,安装在第二驱动电机支座上的第二驱动电机13,与第二驱动电机输出轴联接的第二传动丝杆27,与传动丝杆匹配的第二螺母滑块26,与第二螺母滑块相连的拉杆24,与拉杆相联结的中间体23,与中间体23相联结的指爪滑块22,以及与支撑板14通过导轨销柱20相联结的指爪17组成。第二螺母滑块的两侧设计有导向柱15,导向柱与支撑板上的矩形导向槽19滑动配合。当手爪张合电机转动时,第二螺母滑块26在第二传动丝杆27带动下前后运动,第二螺母滑块26带动拉杆24在第二传动丝杆支座25两侧导向槽内前后移动,拉杆20伸缩带动中间块沿第二传动丝杆27轴方向移动,指爪滑块22伸缩推动指爪17以导向销柱20为轴旋转,并沿支撑板14上的弧形滑槽16移动,从而使得手爪张合机构的两指爪夹紧与松开。
配有本发明的塔架攀爬机器人,在输电线路铁塔上攀爬巡检时的典型动作过程如下:
当塔架自动检修维护攀爬机器人沿电力铁塔构件角钢直线攀爬时,机器人的一只机械手抓紧角钢,另一只机械手处于松开状态,而手臂各关节联动控制,以使该机械臂和处于松开状态的机械手沿着塔架角钢的方向前移。然后联动控制该机械手上的手爪张合机构和夹紧机构抓紧角钢,而将原来夹紧的手爪松开,再通过联动控制手臂各关节,以使该机械手臂沿着角钢前移,然后夹紧原来松开的手爪,松开原来夹紧的手爪,完成一次攀爬。如此周而复始,可使机器人沿塔架主构件角钢一步一步地前进。
本发明借鉴了人类爬杆的动作,结构紧凑、夹紧力大,负载能力大,并且能够从多个方向铁塔上不同摆放形式的角钢进行可靠夹持,使得机器人可以在铁塔三维空间自由移动。当机器人沿铁塔主材立柱上下移动时,可以充分利用本发明两结构相同的手爪张合机构交错布置的特点,易于达到力矩平衡,确保机器人的可靠夹持。
本发明提供的铁塔攀爬机器人机械手末端结构紧凑,夹持力较大,并且通过多轴联动控制,可实现手爪张合机构和夹紧机构从多个方向对不同截面形式杆件的可靠夹持。本发明是一种通用型塔架自动检修维护攀爬机器人末端机械手装置,既可用于关节式攀爬机器人,也可用于框架式自动攀爬机器人。
价值度评估
技术价值
经济价值
法律价值
0 0 057.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:57.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【2 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间9 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
25 个月独立权利要求数量
1 个从属权利要求数量
9 个说明书页数
4 页实施例个数
1 个发明人数量
7 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
2 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
9法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...