【中国实用新型】一种仿生青蛙机器人的脚部结构
无权-未缴年费 中国
- 申请号:
- CN201820290177.3
- 专利权人:
- 宿迁知芃智能科技有限公司
- 授权公告日/公开日:
- 2018.10.19
- 专利有效期:
- 2018.03.01-2028.03.01
- 技术分类:
- B62:无轨陆用车辆
- 转化方式:
- 转让
- 价值度指数:
-
- 55.0分
- 价格:
- 面议
发布人
宿迁知芃智能科技有限公司
联系人桑明喆
-

- 18896524795
-

- 2603577858@qq.com
-

- 2603577858
-

- 18896524795
-

- 苏州市吴中区致能大道106号
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201820290177.3
- 申请日
- 20180301
- 公开/公告号
- CN207985006U
- 公开/公告日
- 20181019
- 申请/专利权人
- [宿迁知芃智能科技有限公司]
- 发明/设计人
- [桑明喆]
- 主分类号
- B62D57/032
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 江苏(32)
- 颁证日
- G06T1/00
- 代理人
摘要
本实用新型所述的一种仿生青蛙机器人的脚部结构,包括前腿、后腿、运动肢、电机杆、主骨干;所述前腿和后腿的结构相同,且前腿对称设置在运动肢前部外侧;所述后腿对称设置在主体后部两侧;所述后腿上设有触地足、三角肢、梯形肢、连接肢;所述触地足上设有固定孔I、固定孔II和卡键,且连接肢上设有固定孔III;所述触地足折叠与连接肢表面接触,且固定孔III与固定孔II相重叠;所述三角肢折叠分别与触地足、梯形肢相互垂直,且三角肢两边分别与触地足、梯形肢通过布连接。本实用新型采用双面PC板中间压布新型复合材料板片,拼接简单,运动灵活,用户体验成效好,不易摔坏。
法律状态
| 法律状态公告日 | 20220222 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):B62D 57/032 专利号:ZL2018202901773 申请日:20180301 授权公告日:20181019 终止日期:20210301 |
| 法律状态公告日 | 20181019 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
权利要求
权利要求数量(5)
独立权利要求数量(1)
1.一种仿生青蛙机器人的脚部结构,其特征在于:包括前腿、后腿、运动肢、电机杆、主 骨干;所述前腿和后腿的结构相同,且前腿对称设置在运动肢前部外侧;所述后腿对称设置 在主体后部两侧;所述后腿上设有触地足、三角肢、梯形肢、连接肢;所述触地足上设有固定 孔I、固定孔II和卡键,且连接肢上设有固定孔III;所述触地足折叠与连接肢表面接触,且 固定孔III与固定孔II相重叠;所述三角肢折叠分别与触地足、梯形肢相互垂直,且三角肢 两边分别与触地足、梯形肢通过布连接;所述连接肢分别与触地足、梯形肢通过布连接,且 连接肢与梯形肢相互垂直;所述主骨干上设有短辅助I,且短辅助I与梯形肢通过布相连接; 所述运动肢上设有电机杆、方形片、短辅助II;所述短辅助II与运动肢相连接,且短辅助II 与连接片相连接;所述方形片与连接片连接,且连接片上设有卡槽,且方形片上设有固定孔 IV;所述触地足上的卡键嵌入卡槽内,且固定孔I与方形片上的固定孔IV相重叠;所述电机 杆置于前腿与后腿之间,且电机杆顶端设有电机孔。
2.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述脚部结构 之间可互相折叠,且各个零件之间通过布连接。
3.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述脚部结构 的固定孔II与固定孔III、固定孔I与固定孔IV使用的是铆钉式连接。
4.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述触地足根 部的卡键与连接片的卡槽采用了卡嵌式连接。
5.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述仿生青蛙 机器人结构采用了双面PC板中间压布新型复合材料。
1.一种仿生青蛙机器人的脚部结构,其特征在于:包括前腿、后腿、运动肢、电机杆、主骨干;所述前腿和后腿的结构相同,且前腿对称设置在运动肢前部外侧;所述后腿对称设置在主体后部两侧;所述后腿上设有触地足、三角肢、梯形肢、连接肢;所述触地足上设有固定孔I、固定孔II和卡键,且连接肢上设有固定孔III;所述触地足折叠与连接肢表面接触,且固定孔III与固定孔II相重叠;所述三角肢折叠分别与触地足、梯形肢相互垂直,且三角肢两边分别与触地足、梯形肢通过布连接;所述连接肢分别与触地足、梯形肢通过布连接,且连接肢与梯形肢相互垂直;所述主骨干上设有短辅助I,且短辅助I与梯形肢通过布相连接;所述运动肢上设有电机杆、方形片、短辅助II;所述短辅助II与运动肢相连接,且短辅助II与连接片相连接;所述方形片与连接片连接,且连接片上设有卡槽,且方形片上设有固定孔IV;所述触地足上的卡键嵌入卡槽内,且固定孔I与方形片上的固定孔IV相重叠;所述电机杆置于前腿与后腿之间,且电机杆顶端设有电机孔。
2.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述脚部结构之间可互相折叠,且各个零件之间通过布连接。
3.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述脚部结构的固定孔II与固定孔III、固定孔I与固定孔IV使用的是铆钉式连接。
4.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述触地足根部的卡键与连接片的卡槽采用了卡嵌式连接。
5.根据权利要求1所述的一种仿生青蛙机器人的脚部结构,其特征在于:所述仿生青蛙机器人结构采用了双面PC板中间压布新型复合材料。
说明书
技术领域
本实用新型涉及机器人领域,特别是一种仿生青蛙机器人的脚部结构。
背景技术
一般来说,仿生机构是机器人领域的一个重要分支,仿生机构是向生物界索取工程技术解决方案的原理,并将这些原理移植到工程技术之中,使机器人的结构模仿着各类生物动作。目前机器人并没有合适的仿生青蛙的方案,未能通过合适的仿生机构模仿青蛙脚部结构的跳跃过程,机器人移动过程中比较呆板,用户的体验较差,且易摔坏。
发明内容
为解决上述问题,本实用新型提供一种仿生青蛙机器人的脚部结构。
本实用新型解决其技术问题所采用的技术方案是:一种仿生机器人的脚部结构,包括前腿、后腿、运动肢、电机杆、主骨干;所述前腿和后腿的结构相同,且前腿对称设置在运动肢前部外侧;所述后腿对称设置在主体后部两侧;所述后腿上设有触地足、三角肢、梯形肢、连接肢;所述触地足上设有固定孔I、固定孔II和卡键,且连接肢上设有固定孔III;所述触地足折叠与连接肢表面接触,且固定孔III与固定孔II相重叠;所述三角肢折叠分别与触地足、梯形肢相互垂直,且三角肢两边分别与触地足、梯形肢通过布连接;所述连接肢分别与触地足、梯形肢通过布连接,且连接肢与梯形肢相互垂直;所述主骨干上设有短辅助I,且短辅助I与梯形肢通过布相连接;所述运动肢上设有电机杆、方形片、短辅助II;所述短辅助II与运动肢相连接,且短辅助II与连接片相连接;所述方形片与连接片连接,且连接片上设有卡槽,且方形片上设有固定孔IV;所述触地足上的卡键嵌入卡槽内,且固定孔I与方形片上的固定孔IV相重叠;所述电机杆置于前腿与后腿之间,且电机杆顶端设有电机孔。
优选的,所述脚部结构之间可互相折叠,且各个零件之间通过布连接。
优选的,所述脚部结构的固定孔II与固定孔III、固定孔I与固定孔IV使用的是铆钉式连接。
优选的,所述触地足根部的卡键与连接片的卡槽采用了卡嵌式连接。
优选的,所述仿生青蛙机器人结构采用了双面PC板中间压布新型复合材料。
本实用新型的有益效果是:采用双面PC板中间压布新型复合材料板片,拼接简单,运动灵活,用户体验成效好,不易摔坏。
附图说明
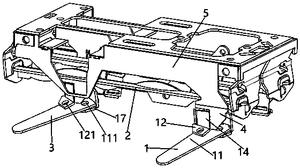
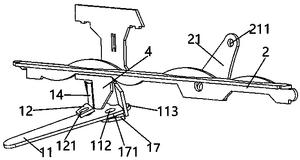
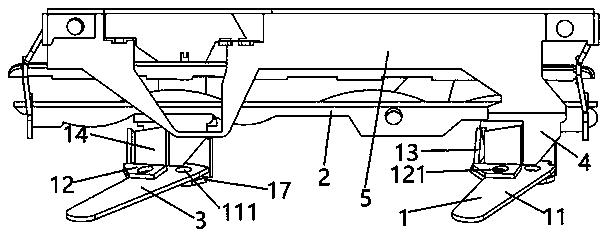
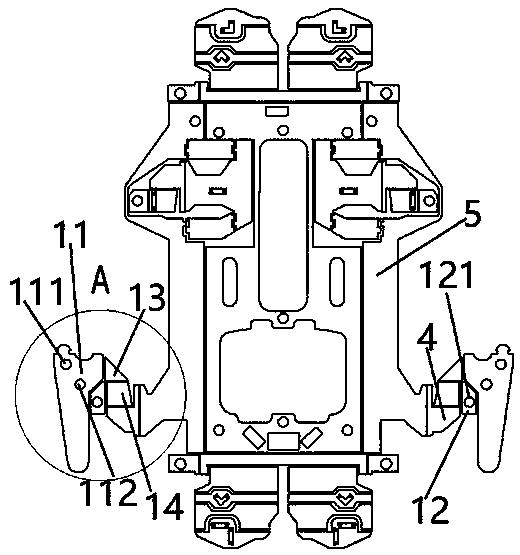
图1为本实用新型所述的一种仿生青蛙机器人的脚部结构的整体视图。
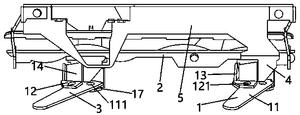
图2为本实用新型所述的一种仿生青蛙机器人的脚部结构的左视图。
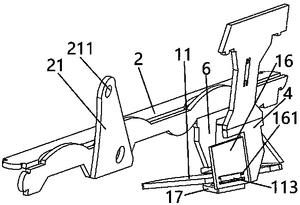
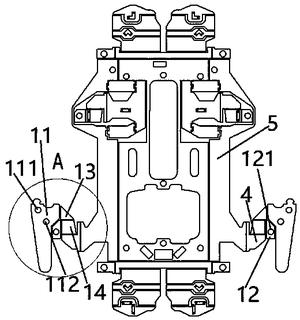
图3为本实用新型所述的一种仿生青蛙机器人的脚部结构的部件第一视图。
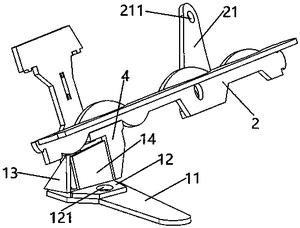
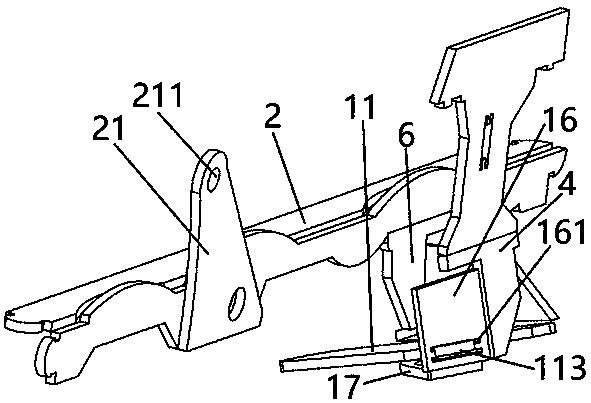
图4为本实用新型所述的一种仿生青蛙机器人的脚部结构的部件第二视图。
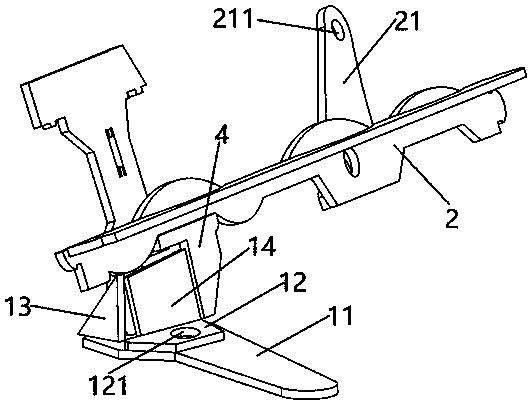
图5为本实用新型所述的一种仿生青蛙机器人的脚部结构的部件第三视图。
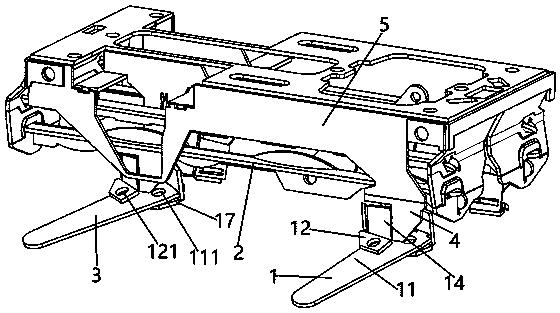
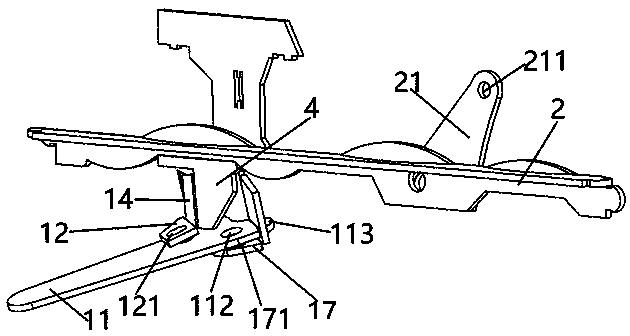
图6为本实用新型所述的一种仿生青蛙机器人的脚部结构的整体展开图。
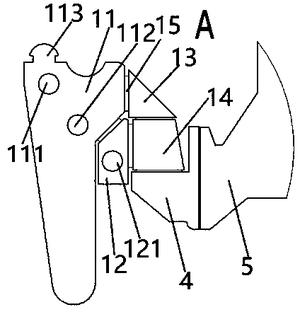
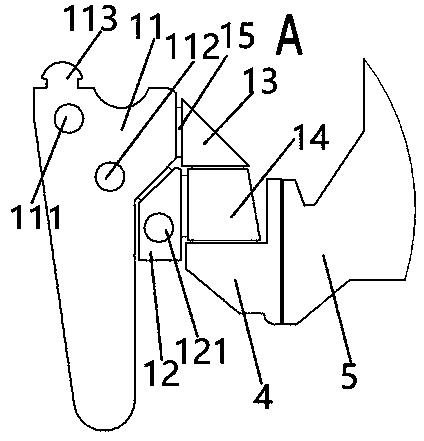
图7为图6的A部放大图。
图中:1、后腿;11、触地足;111、固定孔I;112、固定孔II;113、卡键;12、连接肢;121、固定孔III;13、三角肢;14、梯形肢;15、布;16、连接片;161、卡槽;17、方形片;171、固定孔IV;2、运动肢;21、电机杆;211、电机孔;3、前腿;4、短辅助I;5、主骨干;6、短辅助II。
具体实施方式
为使本实用新型的技术方案更加清楚明白,下面结合附图具体实施例对本实用新型作进一步说明。
如图1所示,包括前腿3、后腿1、运动肢2、电机杆21、主骨干5;所述前腿3和后腿1的结构相同,且前腿3对称设置在运动肢2前部外侧;所述后腿1对称设置在主体后部两侧;所述后腿1上设有触地足11、三角肢13、梯形肢14、连接肢12;所述触地足11上设有固定孔I【111】、固定孔II【112】和卡键113,且连接肢12上设有固定孔III【121】;所述触地足11折叠与连接肢12表面接触,且固定孔III【121】与固定孔II【112】相重叠;所述三角肢13折叠分别与触地足11、梯形肢14相互垂直,且三角肢13两边分别与触地足11、梯形肢14通过布15连接;所述连接肢12分别与触地足11、梯形肢14通过布15连接,且连接肢12与梯形肢14相互垂直;所述主骨干5上设有短辅助I【4】,且短辅助I【4】与梯形肢14通过布15相连接;所述运动肢2上设有电机杆21、方形片17、短辅助II【6】;所述短辅助II【6】与运动肢2相连接,且短辅助II【6】与连接片16相连接;所述方形片17与连接片16连接,且连接片16上设有卡槽161,且方形片17上设有固定孔IV【171】;所述触地足11上的卡键113嵌入卡槽161内,且固定孔I【111】与方形片17上的固定孔IV【171】相重叠;所述电机杆21置于前腿3与后腿1之间,且电机杆21顶端设有电机孔211。
驱动时,在电机杆21处加上电机即可,前腿3跟后腿1同时向中间旋转360度,电机杆21带动运动肢2顺时针旋转,当运动肢2旋转到最高点过程中,与运动肢2相连短辅助II【6】带动连接片16向内摆动,此时主骨干5与短辅助I【4】处于收拢状态,梯形肢14向外翻转,触地足11足尖与地面接触,使机身向前跳跃;当运动肢2运动到最低点过程中,连接片16向外摆动,主骨干5与短辅助I【4】处于展开状态,梯形肢14向内翻转,触地足11跟部与地面接触,完成一次跳跃。
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
价值度评估
技术价值
经济价值
法律价值
0 0 055.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:55.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【被引用次数1 次】专利被引次数越多越能能够体现出该专利在相关技术领域研发中所发挥的基础性作用,代表着专利公开的内容有更多的产业利用价值。 【专利权的维持时间4 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
7 个月独立权利要求数量
1 个从属权利要求数量
4 个说明书页数
2 页实施例个数
1 个发明人数量
1 个被引用次数
1 次引用文献数量
1 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 8.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
企业许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 16.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
4法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...