【中国实用新型】一种抗扰动的高精度台式3D打印机
无权-未缴年费 中国
- 申请号:
- CN201720835487.4
- 专利权人:
- 西南石油大学
- 授权公告日/公开日:
- 2018.02.02
- 专利有效期:
- 2017.07.11-2027.07.11
- 技术分类:
- B29:塑料的加工;一般处于塑性状态物质的加工
- 转化方式:
- 转让
- 价值度指数:
-
- 59.0分
- 价格:
- 面议
发布人
知识产权运营中心
联系人IP先生
-

- 15113831943
-

- 9411117419@qq.com
-

- 941117419
-

- szhf1188(加微信)
-

- 深圳市南山区粤海街道100号
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201720835487.4
- 申请日
- 20170711
- 公开/公告号
- CN206953581U
- 公开/公告日
- 20180202
- 申请/专利权人
- [西南石油大学]
- 发明/设计人
- [陈海锋, 唐洋, 刘志强, 徐培嘉, 肖倩, 罗欣怡]
- 主分类号
- B29C64/20
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 四川(51)
- 颁证日
- G06T1/00
- 代理人
- [袁英]
摘要
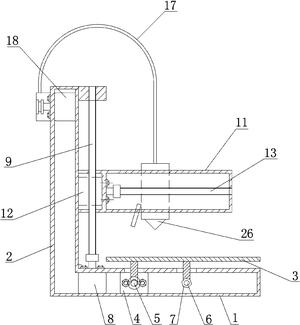
本实用新型公开了一种抗扰动的高精度台式3D打印机,它包括机架、X轴运动机构、Y轴运动机构、Z轴运动机构和远程挤出式走丝机构,机架包括水平设置的底板和垂向设置的侧板,侧板与底板固连;X轴运动机构包括设置于底板上方的成型基板、纵向安装于底板腔体内的步进电机X、旋转安装于底板腔体内且相互平行设置的丝杆X和光杆X;Y轴运动机构包括U型活动板、步进电机Y、旋转安装于U型活动板上且相互平行设置的丝杆Y和光杆Y;远程挤出式走丝机构包括加热喷头和走丝机构。本实用新型的有益效果是:能够输送不同直径的材料丝、方便拆卸和维护、打印精度高,且采用了丝杆螺母传动机构,增强了其抗干扰能力。
法律状态
| 法律状态公告日 | 20240702 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):B29C 64/20 专利号:ZL2017208354874 申请日:20170711 授权公告日:20180202 终止日期: |
| 法律状态公告日 | 20180202 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
权利要求
权利要求数量(6)
独立权利要求数量(1)
1.一种抗扰动的高精度台式3D打印机,其特征在于:它包括机架、X轴运动机构、Y轴运 动机构、Z轴运动机构和远程挤出式走丝机构,所述的机架呈L形,机架包括水平设置的底板 (1)和垂向设置的侧板(2),侧板(2)与底板(1)固连,侧板(2)和底板(1)内均设置有腔体;
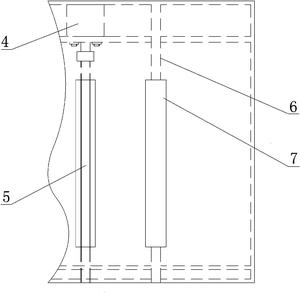
所述的X轴运动机构包括设置于底板(1)上方的成型基板(3)、纵向安装于底板(1)腔体 内的步进电机X(4)、旋转安装于底板(1)腔体内且相互平行设置的丝杆X(5)和光杆X(6),步 进电机X(4)的输出轴经联轴器与丝杆X(5)连接,丝杆X(5)上螺纹连接有螺母,螺母与成型 基板(3)固连,光杆X(6)上安装有导轨X(7),导轨X(7)与成型基板(3)固连;
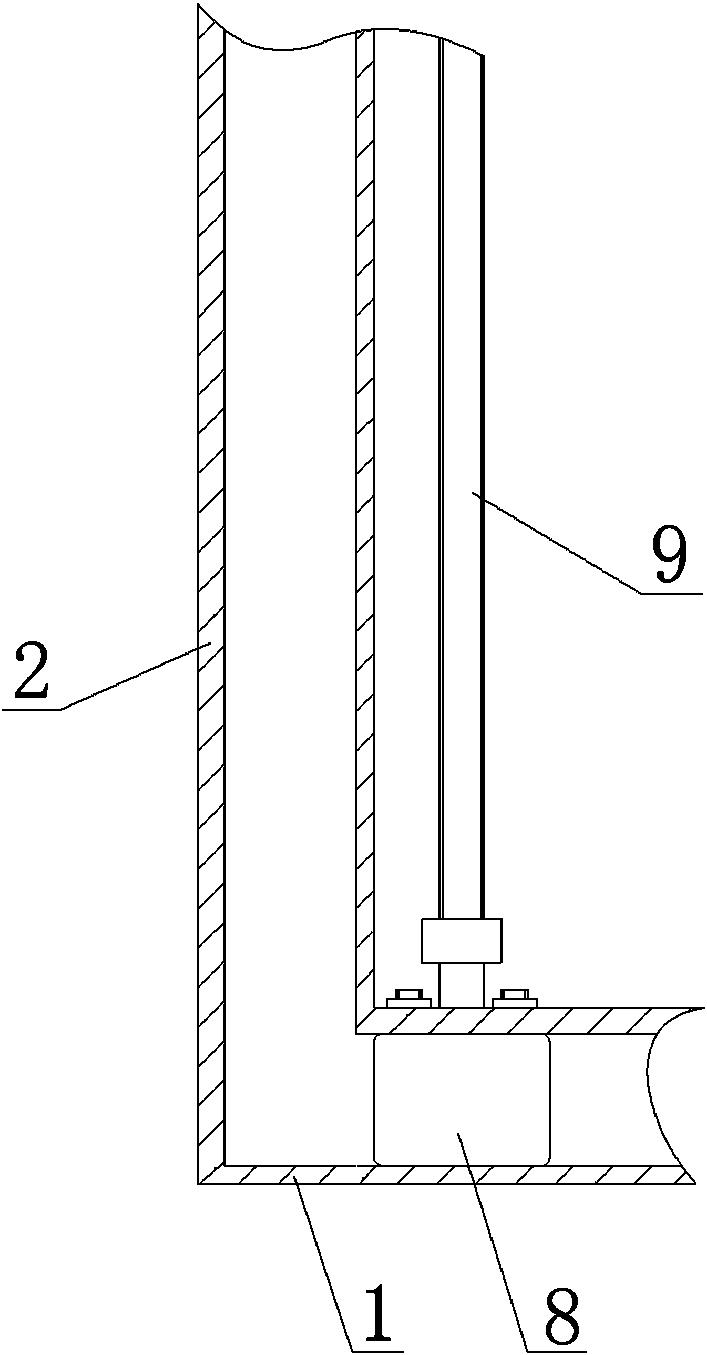
所述的Z轴运动机构包括垂向安装于底板(1)腔体内的步进电机Z(8)、旋转安装于底板 (1)顶部的丝杆Z(9)和光杆Z(10),丝杆Z(9)与光杆Z(10)平行设置,步进电机Z(8)的输出轴 经联轴器与丝杆Z(9)连接;
所述的Y轴运动机构包括U型活动板(11)、步进电机Y(12)、旋转安装于U型活动板(11) 上且相互平行设置的丝杆Y(13)和光杆Y(14),所述丝杆Y(13)和光杆Y(14)位于U型活动板 (11)U形槽的两侧,U型活动板(11)的一端螺纹连接于丝杆Z(9)上,另一端滑动安装于光杆Z (10)上,步进电机Y(12)横向固定安装于U型活动板(11)上,步进电机Y(12)的输出轴经联轴 器与丝杆Y(13)连接,所述的光杆Y(14)上安装有导轨Y(15);
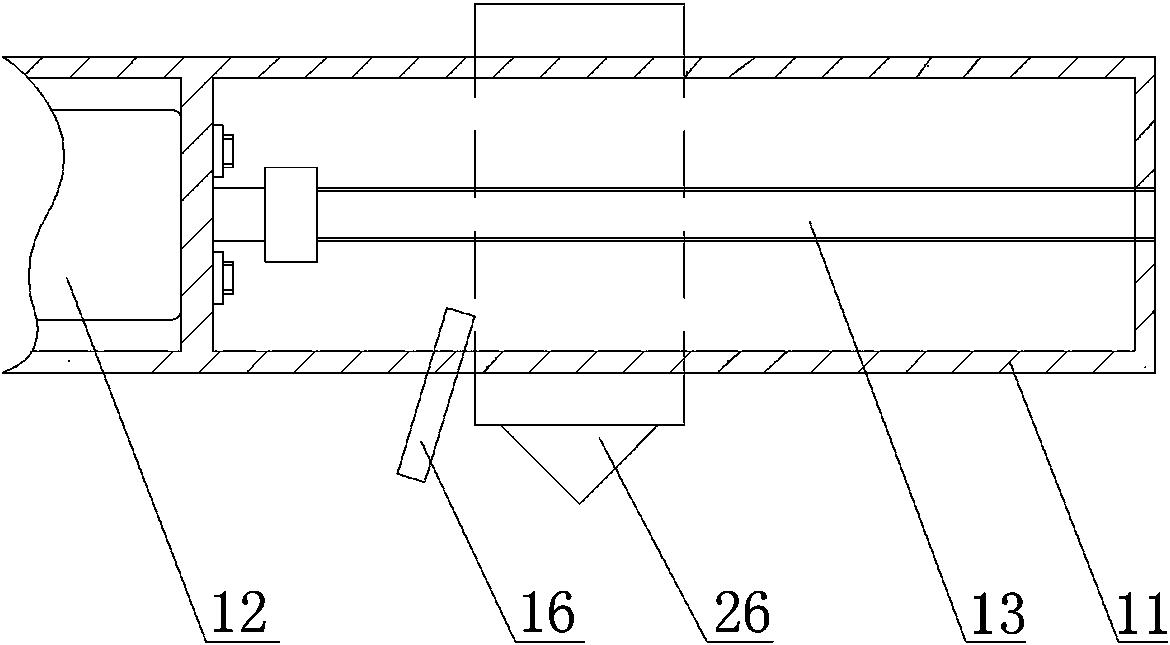
所述的远程挤出式走丝机构包括加热喷头和走丝机构,所述加热喷头位于U型活动板 的U形槽内,加热喷头的一左端螺纹连接于丝杆Y(13)上,另一端固设于导轨Y(15)上,加热 喷头的出口处设置有风扇(16);所述走丝机构包括导管(17)、固定安装于侧板(2)腔体内的 走丝电机(18)、固设于侧板(2)背面的立柱(19),走丝电机(18)输出轴贯穿侧板(2)背面设 置且其上安装有主动走丝轮(20),立柱(19)上固设有弹簧(21),弹簧(21)的另一端固连有 辅助装置(22),辅助装置(22)上经转轴旋转安装有从动轮(23),从动轮(23)在弹簧恢复力 作用下抵压于主动走丝轮(20)上,从动轮(23)和主动走丝轮(20)接触处的正上方与导管 (17)入口端对接,导管(17)的出口端与隔热器(25)连接。
2.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的底板 (1)的腔体内还设置有控制器,所述的控制器与步进电机X(4)、步进电机Y(12)、走丝电机 (18)、步进电机Z(8)、隔热器(25)、风扇(16)连接。
3.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的加热 喷头包括由上往下顺次连接的过渡隔热件(24)、隔热器(25)和喷嘴(26)。
4.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的风扇 (16)固设于过渡隔热件(24)上,且与过渡隔热件(24)轴线呈夹角设置。
5.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的导管 (17)呈倒U形状,且其出口端与过渡隔热件(24)连接。
6.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的辅助 装置(22)为滑动板。
1.一种抗扰动的高精度台式3D打印机,其特征在于:它包括机架、X轴运动机构、Y轴运动机构、Z轴运动机构和远程挤出式走丝机构,所述的机架呈L形,机架包括水平设置的底板(1)和垂向设置的侧板(2),侧板(2)与底板(1)固连,侧板(2)和底板(1)内均设置有腔体;
所述的X轴运动机构包括设置于底板(1)上方的成型基板(3)、纵向安装于底板(1)腔体内的步进电机X(4)、旋转安装于底板(1)腔体内且相互平行设置的丝杆X(5)和光杆X(6),步进电机X(4)的输出轴经联轴器与丝杆X(5)连接,丝杆X(5)上螺纹连接有螺母,螺母与成型基板(3)固连,光杆X(6)上安装有导轨X(7),导轨X(7)与成型基板(3)固连;
所述的Z轴运动机构包括垂向安装于底板(1)腔体内的步进电机Z(8)、旋转安装于底板(1)顶部的丝杆Z(9)和光杆Z(10),丝杆Z(9)与光杆Z(10)平行设置,步进电机Z(8)的输出轴经联轴器与丝杆Z(9)连接;
所述的Y轴运动机构包括U型活动板(11)、步进电机Y(12)、旋转安装于U型活动板(11)上且相互平行设置的丝杆Y(13)和光杆Y(14),所述丝杆Y(13)和光杆Y(14)位于U型活动板(11)U形槽的两侧,U型活动板(11)的一端螺纹连接于丝杆Z(9)上,另一端滑动安装于光杆Z(10)上,步进电机Y(12)横向固定安装于U型活动板(11)上,步进电机Y(12)的输出轴经联轴器与丝杆Y(13)连接,所述的光杆Y(14)上安装有导轨Y(15);
所述的远程挤出式走丝机构包括加热喷头和走丝机构,所述加热喷头位于U型活动板的U形槽内,加热喷头的一左端螺纹连接于丝杆Y(13)上,另一端固设于导轨Y(15)上,加热喷头的出口处设置有风扇(16);所述走丝机构包括导管(17)、固定安装于侧板(2)腔体内的走丝电机(18)、固设于侧板(2)背面的立柱(19),走丝电机(18)输出轴贯穿侧板(2)背面设置且其上安装有主动走丝轮(20),立柱(19)上固设有弹簧(21),弹簧(21)的另一端固连有辅助装置(22),辅助装置(22)上经转轴旋转安装有从动轮(23),从动轮(23)在弹簧恢复力作用下抵压于主动走丝轮(20)上,从动轮(23)和主动走丝轮(20)接触处的正上方与导管(17)入口端对接,导管(17)的出口端与隔热器(25)连接。
2.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的底板(1)的腔体内还设置有控制器,所述的控制器与步进电机X(4)、步进电机Y(12)、走丝电机(18)、步进电机Z(8)、隔热器(25)、风扇(16)连接。
3.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的加热喷头包括由上往下顺次连接的过渡隔热件(24)、隔热器(25)和喷嘴(26)。
4.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的风扇(16)固设于过渡隔热件(24)上,且与过渡隔热件(24)轴线呈夹角设置。
5.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的导管(17)呈倒U形状,且其出口端与过渡隔热件(24)连接。
6.根据权利要求1所述的一种抗扰动的高精度台式3D打印机,其特征在于:所述的辅助装置(22)为滑动板。
说明书
技术领域
本实用新型涉及熔融沉积制造3D打印的技术领域,特别是一种抗扰动的高精度台式3D打印机。
背景技术
3D打印机是一个基于专门的计算机文件创建真实物理对象一种机器,其创建方式是增材创建,因而该过程被称为“加法制造”。简单地讲,3D打印机是一种机器,它可以把蓝图变成一个物理对象。用户为它设计一个模式,该模式以图形的形式展现给用户,而以程序的形式存在于微型计算机;计算机按照这个模式工作,通过专门材料的组合,将产生一个与预想蓝图相对应的物理对象。
目前,3D打印技术已经有十多种工艺,按照成型原理的不同,可分为激光激光加工和非激光加工两种,其中典型的有:激光固化造型(SLA)、选择性激光烧结(SLS)、分层实体制造(LOM)和熔融沉积制造(FDM)。其中,熔融沉积制造(FDM)被称为熔丝沉积,它将热熔性材料丝加热到融化,丝状材料被微细喷嘴挤出,熔化的材料逐层堆积形成零件,从而实现3D打印。然而,驱动热熔性材料丝的走丝机构安装于喷嘴上,导致喷嘴重量大,惯性大,喷头定位移动不精确,进一步导致打印精度低。由于喷嘴长期处于高温状态下工作,容易烧毁,存在使用寿命短的缺陷。此外现有的熔融沉积式打印机只能输送恒定直径的材料丝,使用范围有限,因此不推广采用。
发明内容
本实用新型的目的在于克服现有技术的缺点,提供一种结构紧凑、能够输送不同直径的材料丝、抗干扰能力强、方便拆卸和维护、打印精度高的抗扰动的高精度台式3D打印机。
本实用新型的目的通过以下技术方案来实现:一种抗扰动的高精度台式3D打印机,它包括机架、X轴运动机构、Y轴运动机构、Z轴运动机构和远程挤出式走丝机构,所述的机架呈L形,机架包括水平设置的底板和垂向设置的侧板,侧板与底板固连,侧板和底板内均设置有腔体。所述的机架为L式开放结构,相比传统的矩形结构,减少了材料的消耗,结构简单,便于拆卸与清洁,提高了可维护性,外形更加美观。
所述的X轴运动机构包括设置于底板上方的成型基板、纵向安装于底板腔体内的步进电机X、旋转安装于底板腔体内且相互平行设置的丝杆X和光杆X,步进电机X的输出轴经联轴器与丝杆X连接,丝杆X上螺纹连接有螺母,螺母与成型基板固连,光杆X上安装有导轨X,导轨X与成型基板固连;
所述的Z轴运动机构包括垂向安装于底板腔体内的步进电机Z、旋转安装于底板顶部的丝杆Z和光杆Z,丝杆Z与光杆Z平行设置,步进电机Z的输出轴经联轴器与丝杆Z连接;
所述的Y轴运动机构包括U型活动板、步进电机Y、旋转安装于U型活动板上且相互平行设置的丝杆Y和光杆Y,所述丝杆Y和光杆Y位于U型活动板U形槽的两侧,U型活动板的一端螺纹连接于丝杆Z上,另一端滑动安装于光杆Z上,步进电机Y横向固定安装于U型活动板上,步进电机Y的输出轴经联轴器与丝杆Y连接,所述的光杆Y上安装有导轨Y;
所述的远程挤出式走丝机构包括加热喷头和走丝机构,所述加热喷头位于U型活动板的U形槽内,加热喷头的一左端螺纹连接于丝杆Y上,另一端固设于导轨Y上,加热喷头的出口处设置有风扇;所述行走机构包括导管、固定安装于侧板腔体内的走丝电机、固设于侧板背面的立柱,走丝电机输出轴贯穿侧板背面设置且其上安装有主动走丝轮,立柱上固设有弹簧,弹簧的另一端固连有辅助装置,辅助装置上经转轴旋转安装有从动轮,从动轮在弹簧恢复力作用下抵压于主动走丝轮上,从动轮和主动走丝轮接触处的正上方与导管入口端对接,导管的出口端与隔热器连接。
所述的底板的腔体内还设置有控制器,所述的控制器与步进电机X、步进电机Y、走丝电机、步进电机Z、隔热器、风扇连接。
所述的加热喷头包括由上往下顺次连接的过渡隔热件、隔热器和喷嘴。
所述的风扇固设于过渡隔热件上,且与过渡隔热件轴线呈夹角设置。
所述的导管呈倒U形状,且其出口端与过渡隔热件连接。
所述的辅助装置为滑动板。
本实用新型具有以下优点:(1)本实用新型能够输送不同直径的材料丝、方便拆卸和维护、打印精度高。(2)本实用新型的加热喷头和走丝机构相互分离,走丝机构并没有安装于加热喷头上,采用远程传送材料丝,从而减轻Y轴运动机构的总质量,进一步的减轻加热喷头总重量,运动惯性小,移动定位更精准,抗干扰能力强。
附图说明
图1 为本实用新型的结构示意图;
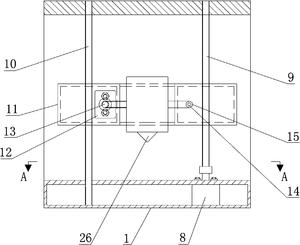
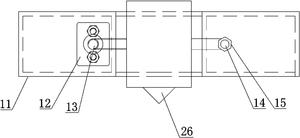
图2 为图1的右视图;
图3 为图2的A-A剖视图;
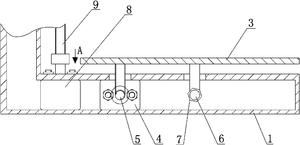
图4 为X轴运动机构的结构示意图;
图5 为图4中的A向视图;
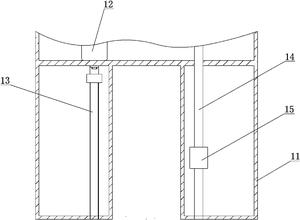
图6 为Y轴运动机构的结构示意图;
图7 为图6的俯视图;
图8 为图6的左视图;
图9 为Z轴运动机构的结构示意图;
图10为图9的右视图;
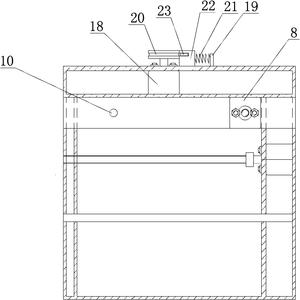
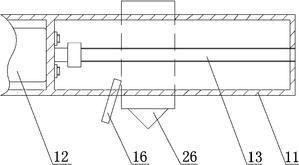
图11为远程挤出式走丝机构的结构示意图;
图中,1-底板,2-侧板,3-成型基板,4-步进电机X,5-丝杆X,6-光杆X,7-导轨X,8-步进电机Z,9-丝杆Z,10-光杆Z,11-U型活动板,12-步进电机Y,13-丝杆Y,14-光杆Y,15-导轨Y,16-风扇,17-导管,18-走丝电机,19-立柱,20-主动走丝轮,21-弹簧,22-辅助装置,23-从动轮,24-过渡隔热件,25-隔热器,26-喷嘴。
具体实施方式
下面结合附图对本实用新型做进一步的描述,本实用新型的保护范围不局限于以下所述:
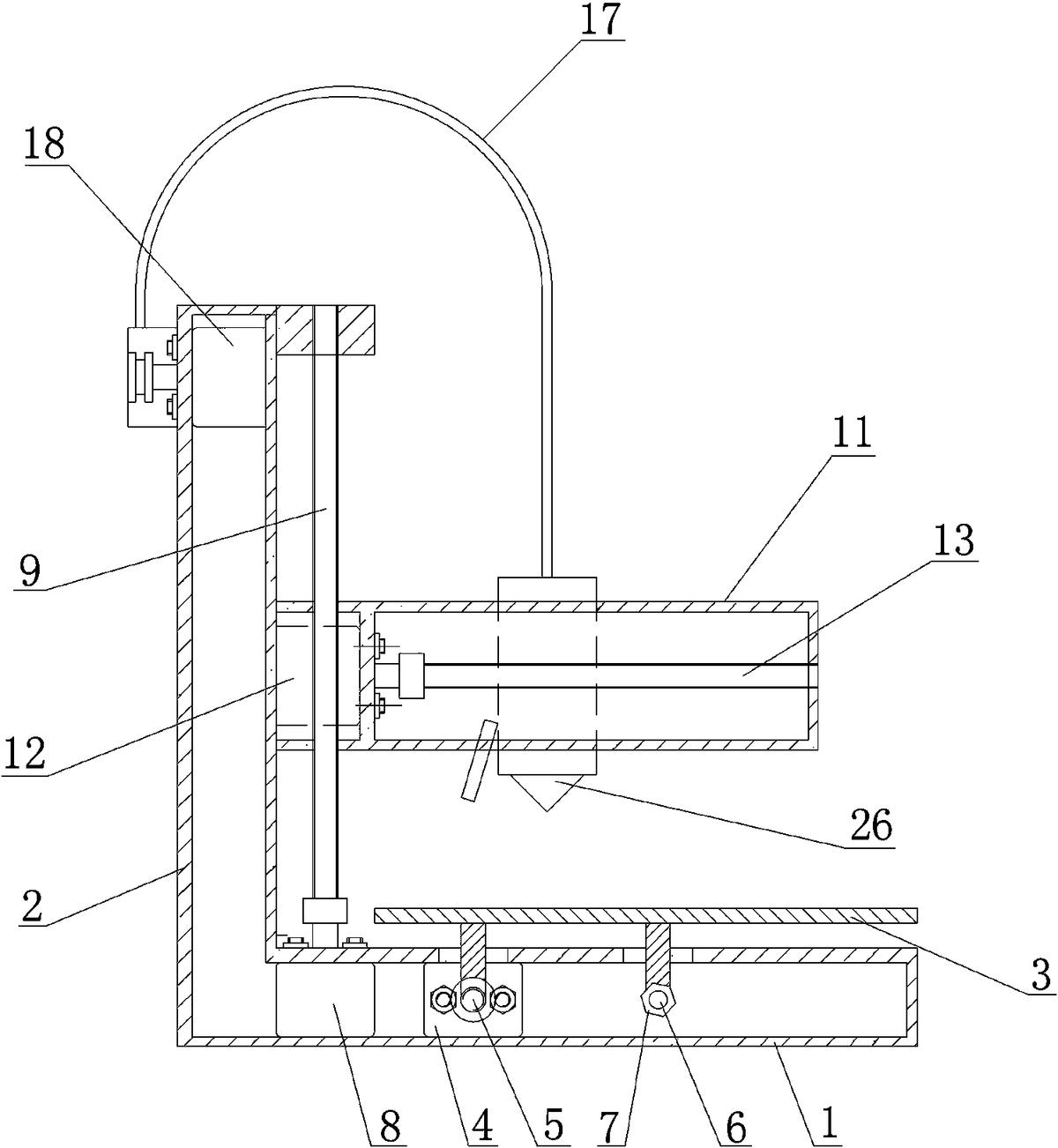
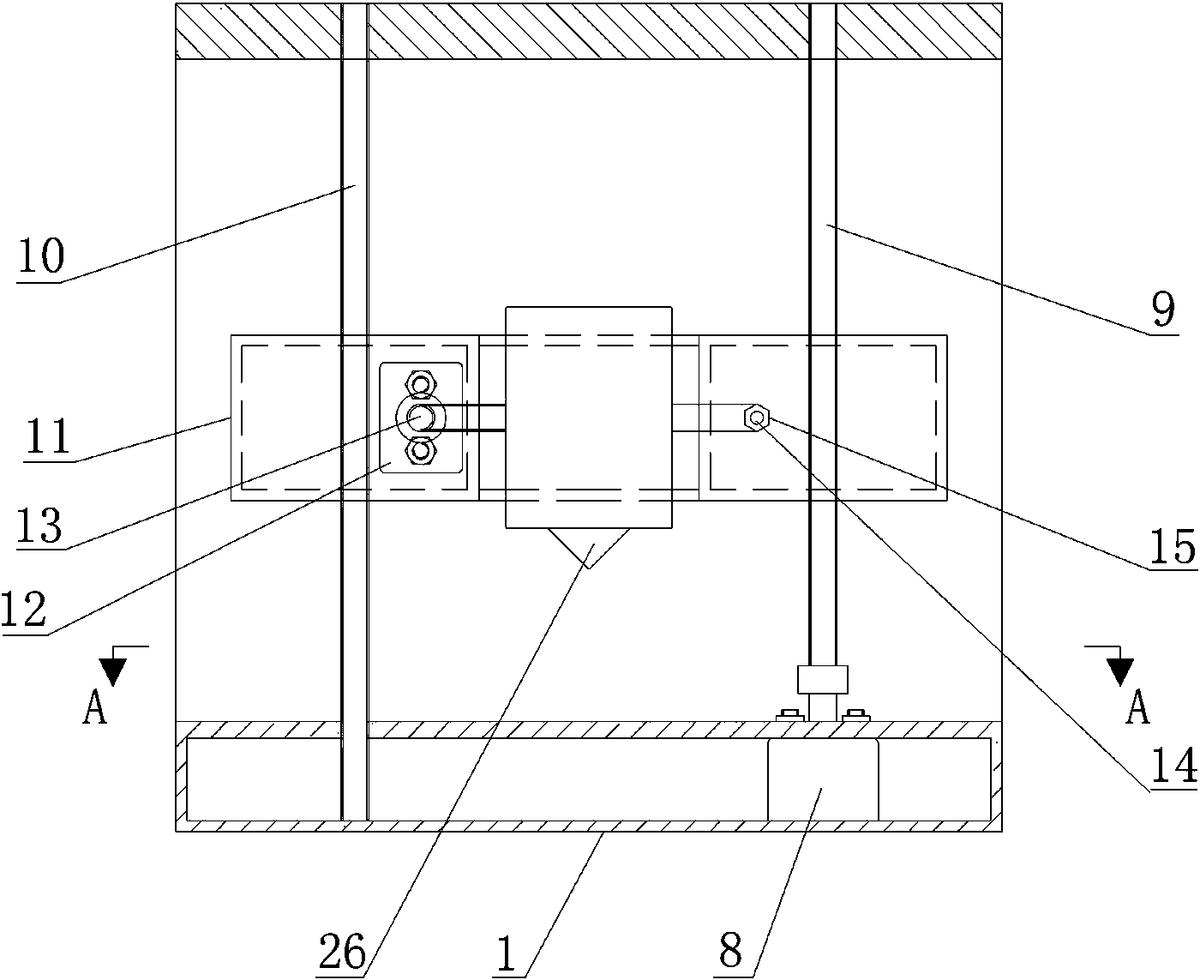
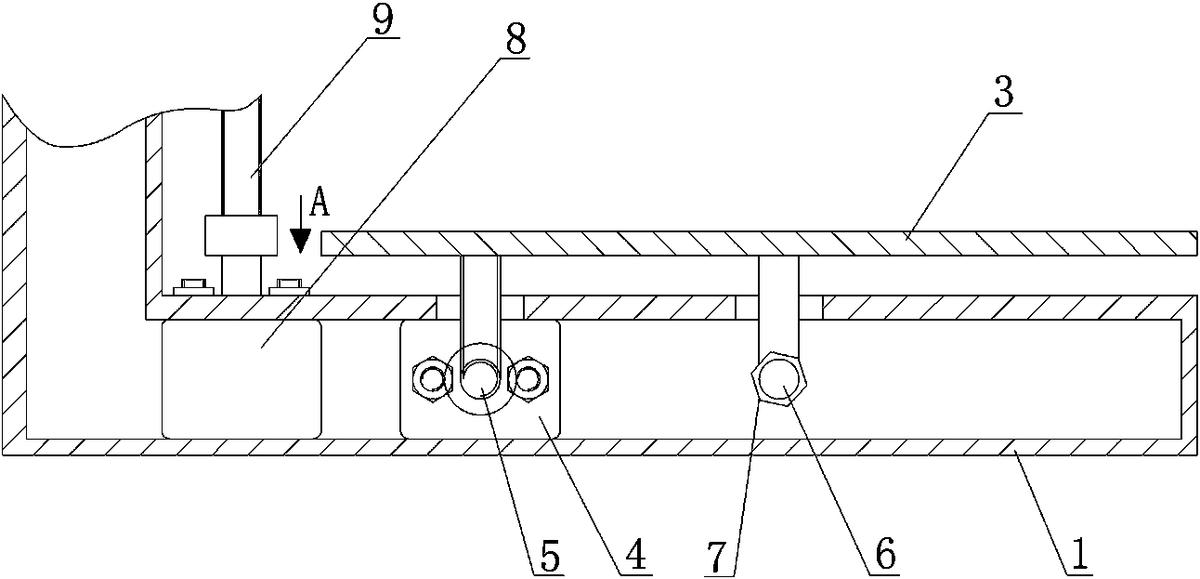
如图1~3所示,一种抗扰动的高精度台式3D打印机,它包括机架、X轴运动机构、Y轴运动机构、Z轴运动机构和远程挤出式走丝机构,所述的机架呈L形,机架包括水平设置的底板1和垂向设置的侧板2,侧板2与底板1固连,侧板2和底板1内均设置有腔体。
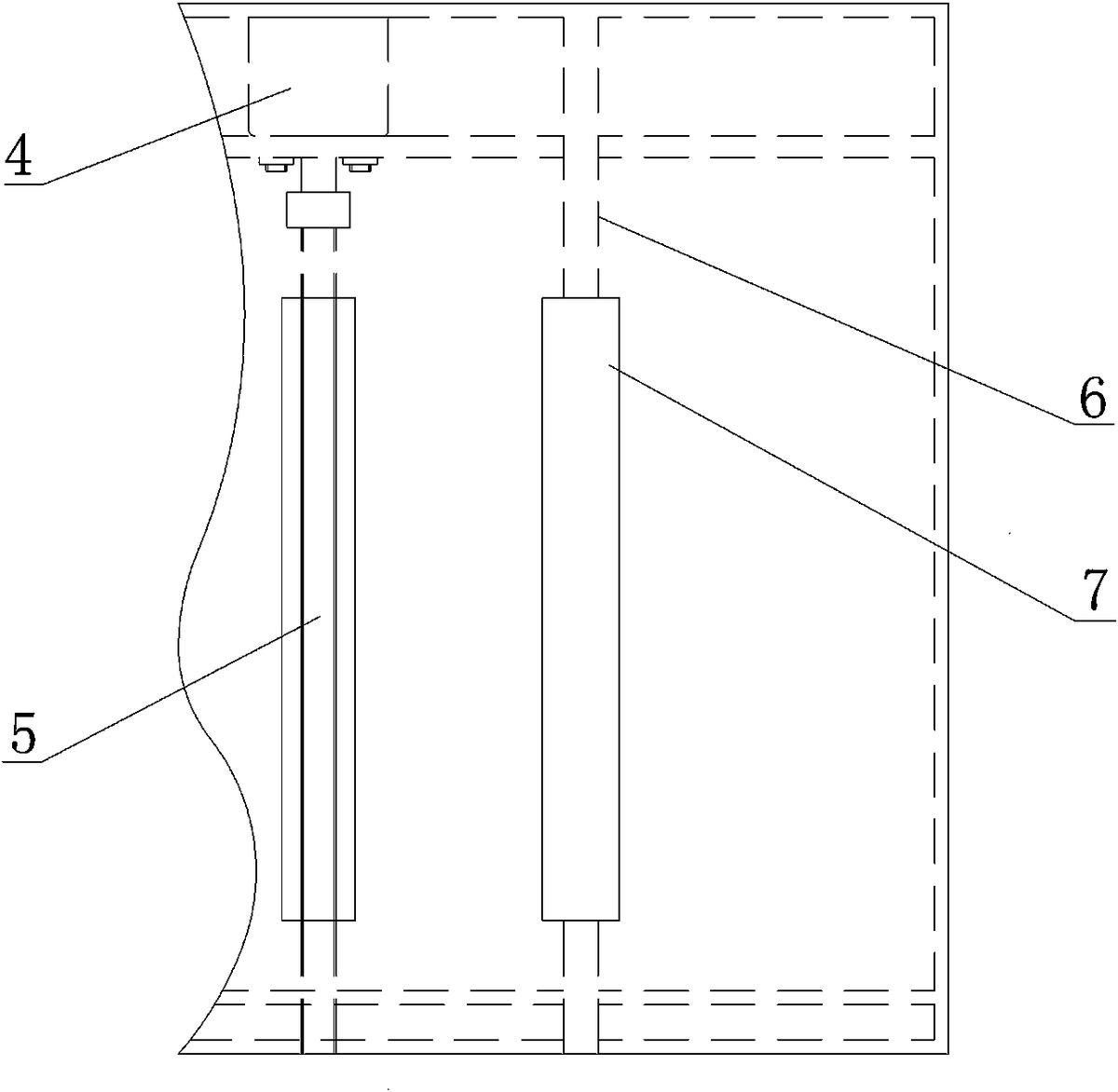
如图4~5所示,所述的X轴运动机构包括设置于底板1上方的成型基板3、纵向安装于底板1腔体内的步进电机X4、旋转安装于底板1腔体内且相互平行设置的丝杆X5和光杆X6,步进电机X4的输出轴经联轴器与丝杆X5连接,丝杆X5上螺纹连接有螺母,螺母与成型基板3固连,光杆X6上安装有导轨X7,导轨X7与成型基板3固连。
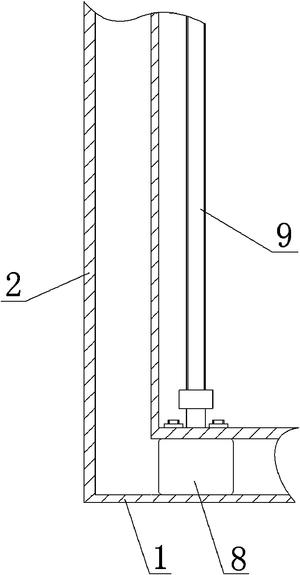
如图9~10所示,所述的Z轴运动机构包括垂向安装于底板1腔体内的步进电机Z8、旋转安装于底板1顶部的丝杆Z9和光杆Z10,丝杆Z9与光杆Z10平行设置,步进电机Z8的输出轴经联轴器与丝杆Z9连接。
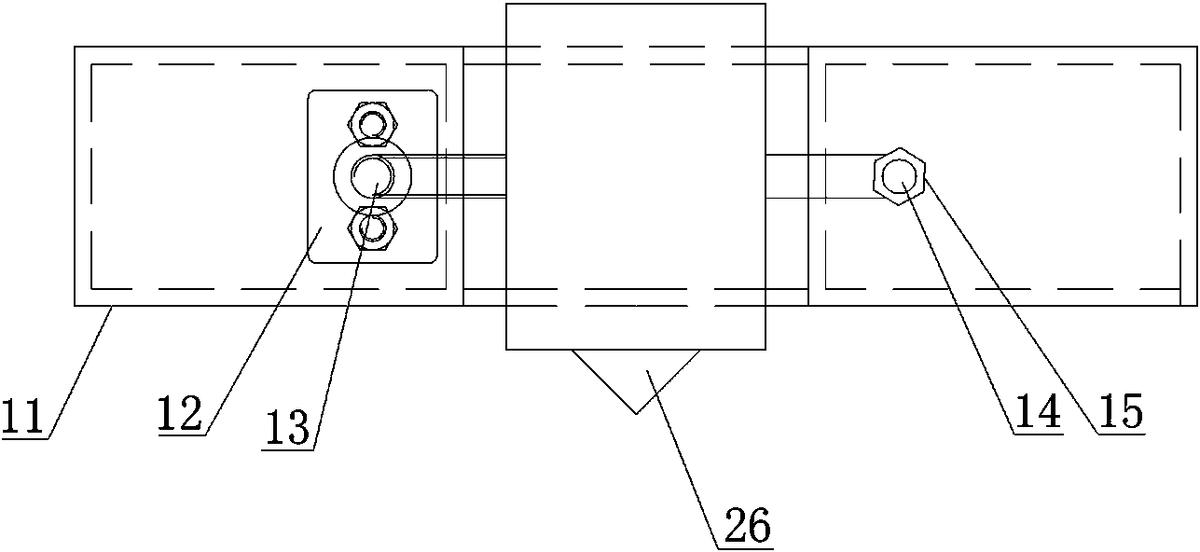
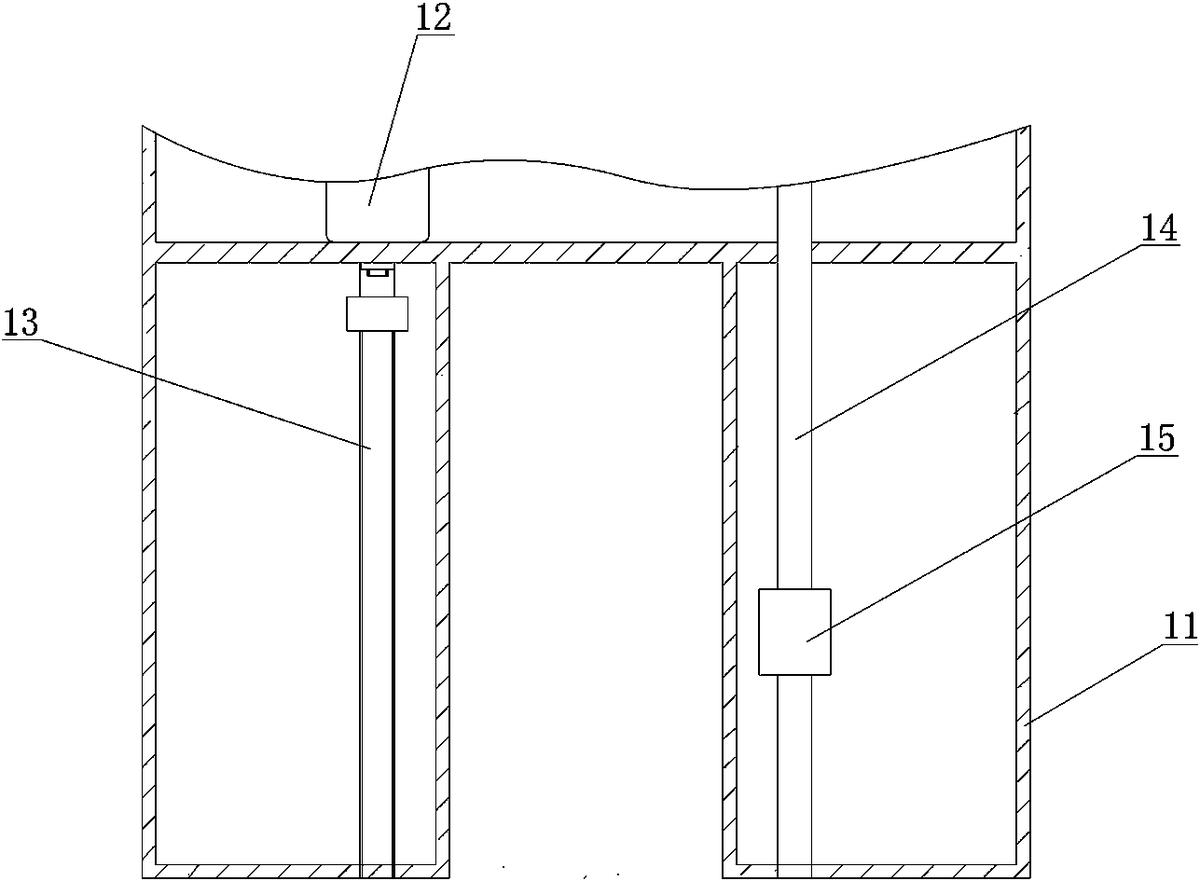
如图6~8所示,所述的Y轴运动机构包括U型活动板11、步进电机Y12、旋转安装于U型活动板11上且相互平行设置的丝杆Y13和光杆Y14,所述丝杆Y13和光杆Y14位于U型活动板11U形槽的两侧,U型活动板11的一端螺纹连接于丝杆Z9上,另一端滑动安装于光杆Z10上,步进电机Y12横向固定安装于U型活动板11上,步进电机Y12的输出轴经联轴器与丝杆Y13连接,所述的光杆Y14上安装有导轨Y15。
如图11所示,所述的远程挤出式走丝机构包括加热喷头和走丝机构,所述加热喷头位于U型活动板的U形槽内,加热喷头的一左端螺纹连接于丝杆Y13上,另一端固设于导轨Y15上,加热喷头的出口处设置有风扇16,风扇16固设于过渡隔热件24上,且与过渡隔热件24轴线呈夹角设置,风扇16朝向喷嘴26设置,加热喷头包括由上往下顺次连接的过渡隔热件24、隔热器25和喷嘴26。
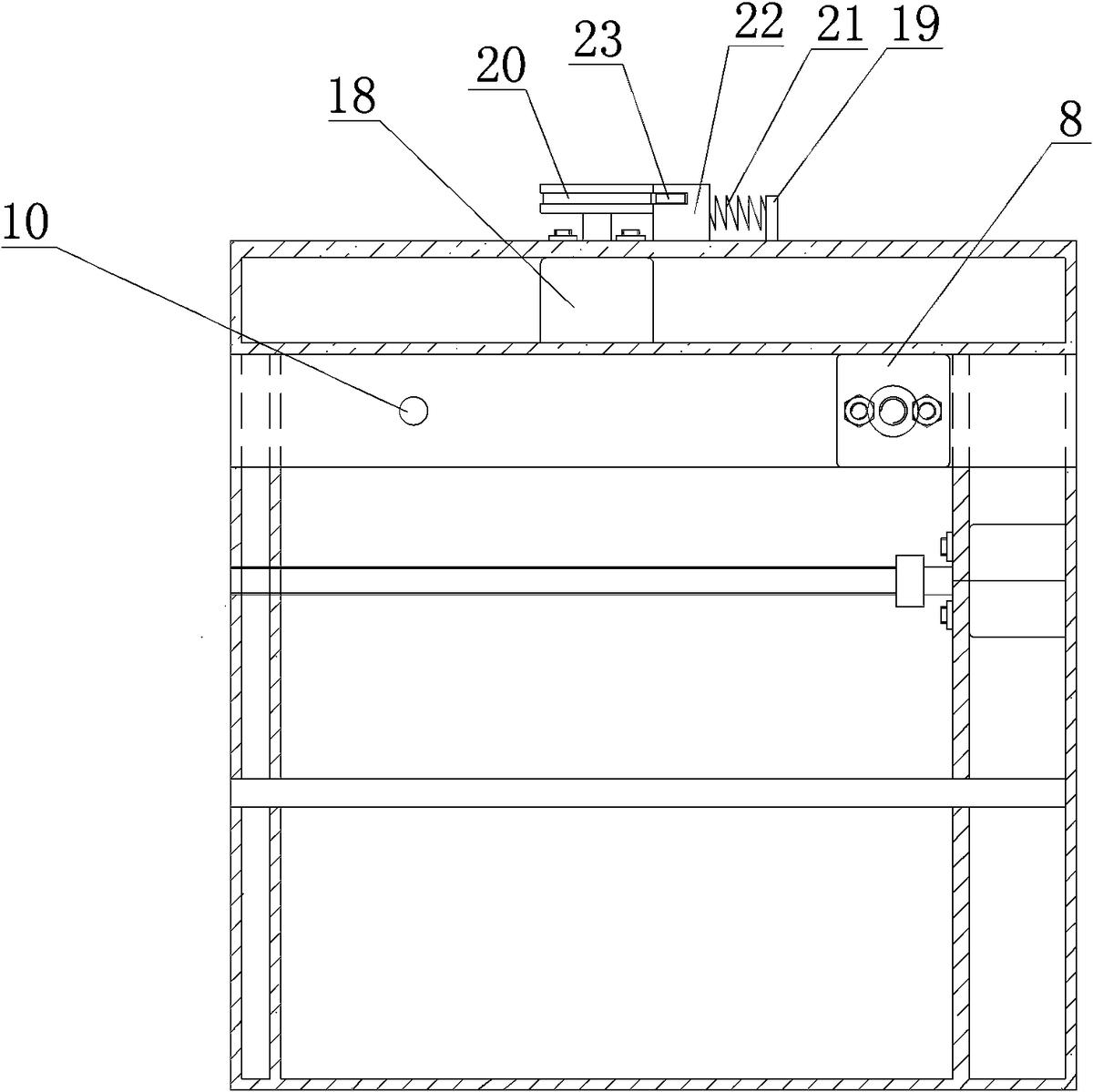
所述行走机构包括导管17、固定安装于侧板2腔体内的走丝电机18、固设于侧板2背面的立柱19,走丝电机18输出轴贯穿侧板2背面设置且其上安装有主动走丝轮20,立柱19上固设有弹簧21,弹簧21的另一端固连有辅助装置22,本实施例中辅助装置22为滑动板。辅助装置22上经转轴旋转安装有从动轮23,从动轮23在弹簧恢复力作用下抵压于主动走丝轮20上,从动轮23和主动走丝轮20接触处的正上方与导管17入口端对接,导管17的出口端与隔热器25连接。所述的从动轮23可挤压弹簧21,因此能够调整从动轮23与主动走丝轮20之间的间隙,能够输送不同直径的材料丝,应用范围更广。
所述的底板1的腔体内还设置有控制器,所述的控制器与步进电机X4、步进电机Y12、走丝电机18、步进电机Z8、隔热器25、风扇16连接,控制器能够控制步进电机X4、步进电机Y12和步进电机Z8做正反转,同时还能控制走丝电机18做正反转。当步进电机X4转动时,丝杆X5上的螺母沿着丝杆X5直线移动,从而带动成型基板3做直线移动;当步进电机Y12转动时,丝杆Y13上的加热喷头沿着丝杆Y13做直线移动;当步进电机Z8转动时,U型活动板11沿着丝杆Z9做直线移动。导轨则是用来保证移动的平稳性,提高打印精度,减小打印误差。
所述的导管17呈倒U形状,且其出口端与过渡隔热件24连接。
本实用新型的工作步骤如下:
S1、将收卷于收料盘上的材料丝的首端穿过从动轮23和主动走丝轮20,材料丝在弹簧21弹力作用下压紧于主动走丝轮20上,随后将材料丝的首端顺次穿过导管17、过渡隔热件24、隔热器25最后穿入喷嘴26内;
S2、利用三维软件制作出零件的三维模型,将三维模型的构建数据通过编译器编译后生成的机器码,最后将机器码传送给控制器;
S3、零件底层的打印,控制器控制步进电机X4和步进电机Y12做正反转,成型基板3沿纵向方向做往复直线运动,而加热喷头沿横向方向做往复直线运动;控制器控制隔热器25、风扇16和走丝电机18启动,隔热器25将处于其内的材料丝熔化,熔化后的材料挤入于喷嘴26内,并经喷嘴26喷射到成型基板3上,而走丝电机18控制主动走丝轮20做顺时针转动,连续的将收料盘上的材料丝输入于加热喷头内,逐渐打印出零件底层部分;
S4、控制器控制步进电机Z8正转,U型活动板11沿着丝杆Z9向上移动一段距离,随后控制器关闭步进电机Z8,重复步骤S3即可在底层的基础上打印出倒数第二层;
S5、反复多次执行步骤S3~S4,即可在成型基板3上打印出各层,最后连续的各层即构成了三维零件实体;各运动机构在预先编译的程序驱动下返回至原点,同时风扇16启动,对喷头进行降温。
价值度评估
技术价值
经济价值
法律价值
0 0 059.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:59.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【9 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【被引用次数1 次】专利被引次数越多越能能够体现出该专利在相关技术领域研发中所发挥的基础性作用,代表着专利公开的内容有更多的产业利用价值。 【专利权的维持时间7 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 33.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
6 个月独立权利要求数量
1 个从属权利要求数量
5 个说明书页数
4 页实施例个数
1 个发明人数量
6 个被引用次数
1 次引用文献数量
1 个优先权个数
0 个技术分类数量
9 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
7法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...