

【中国发明,中国发明授权】基于压缩感知的单阵元多角度观测光声成像装置及方法
无权-未缴年费 中国
- 申请号:
- CN201010587335.X
- 专利权人:
- 哈尔滨工业大学
- 授权公告日/公开日:
- 2013.03.13
- 专利有效期:
- 2010.12.14-2030.12.14
- 技术分类:
- A61:医学或兽医学;卫生学
- 转化方式:
- 转让
- 价值度指数:
-
- 60.0分
- 价格:
- 面议
发布人
哈尔滨工业大学
联系人何老师
-

- 13151263266

-

- 302910554
-

- 13151263266

- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201010587335.X
- 申请日
- 20101214
- 公开/公告号
- CN102068277A
- 公开/公告日
- 20110525
- 申请/专利权人
- [哈尔滨工业大学]
- 发明/设计人
- [冯乃章, 孙明健, 沈毅, 马立勇, 李建刚, 伍政华]
- 主分类号
- A61B8/00
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 中国,CN,黑龙江(23)
- 颁证日
- G06T1/00
- 代理人
- [张果瑞]
摘要
基于压缩感知的单阵元多角度观测光声成像装置及方法,属于光声成像技术领域,本发明为解决现有光声技术进行生物组织的成像存在伪迹严重、图像变形、硬件成本较高并且图像横向分辨率差的问题。本发明采用脉冲激光器发出脉冲激光束,通过光学掩膜照射到生物组织上产生光声信号,通过两个成角度的单阵元超声探测器同步观测并采集光声信号,经放大后送到A/D转换器均匀采样,采用FPGA将采集到的光声图像数据输入到计算机中,在计算机上进行图像重建与融合处理。本发明采用单阵元超声探测器并行采集、基于压缩感知算法快速重建的处理机制和硬件平台,在降低采样数据和采集时间的前提下,保证了图像的高分辨率,成像装置操作简单。
法律状态
| 法律状态公告日 | 20251205 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):A61B 8/00 专利号:ZL201010587335X 申请日:20101214 授权公告日:20130313 终止日期: |
| 法律状态公告日 | 20130313 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20110706 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效IPC(主分类):A61B 8/00申请日:20101214 |
| 法律状态公告日 | 20110525 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
权利要求
权利要求数量(10)
独立权利要求数量(2)
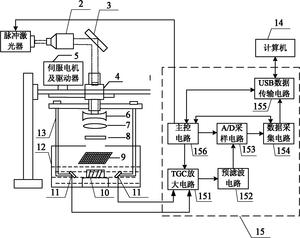
1.基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:它包括脉冲激光器(1)、脉冲激光处理装置、伺服电机及驱动器(5)、光学掩膜(9)、单阵元超声探测器(11)、样品池(12)、支架(13)、计算机(14)和信号采集电路(15),
在样品池(12)的正上方设置光学掩膜(9),信号采集电路(15)的测量矩阵输出端与光学掩膜(9)的输入端相连,信号采集电路(15)的光束控制端与脉冲激光器(1)的控制端相连,脉冲激光器(1)发出的脉冲激光经过脉冲激光处理装置处理后,发射至透过光学掩膜(9)表面,并透过光学掩膜(9)照射在样品池(12)内,
两个单阵元超声探测器(11)镜像设置在样品池(12)内左右两侧,所述单阵元超声探测器(11)通过支架(13)和伺服电机及驱动器(5)的动力输出端固定连接,所述伺服电机及驱动器(5)能够通过支架(13)控制所述单阵元超声探测器(11)的阵元面的旋转角度,每个单阵元超声探测器(11)的回波信号输出端与信号采集电路(15)的光声信号输入端相连,信号采集电路(15)将处理过的回波数据输出给计算机(14),计算机(14)用于采用基于压缩感知算法完成对回波数据进行图像重建,并将单阵元超声探测器(11)不同角度观测到的图像进行融合处理,获取待测生物组织(10)的光声图像。
2.根据权利要求1所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:信号采集电路(15)包括TGC放大电路(151)、预滤波电路(152)、A/D采样电路(153)、数据采集电路(154)、USB数据传输电路(155)和主控电路(156),
主控电路(156)内置FPGA,主控电路(156)内置的FPGA控制光学掩膜(9)产生压缩感知重建算法的测量矩阵,主控电路(156)内置的FPGA控制触发脉冲激光器(1)产生脉冲激光,主控电路(156)的串行数据控制端与USB数据传输电路(155)的串行数据控制端相连,主控电路(156)的数据采集信号控制端与数据采集电路(154)的信号控制端相连,主控电路(156)的A/D采样信号控制端与A/D采样电路(153)的信号控制端相连,主控电路(156)的放大信号控制端与TGC放大电路(151)的信号控制端相连,
TGC放大电路(151)接收两个单阵元超声探测器(11)观测的光声信号,TGC放大电路(151)的输出端与预滤波电路(152)的输入端相连,预滤波电路(152)的输出端与A/D采样电路(153)的输入端相连,A/D采样电路(153)的输出端与数据采集电路(154)的输入端相连,数据采集电路(154)的输出端与USB数据传输电路(155)的输入端相连,USB数据传输电路(155)的输出端与计算机(14)的输入端相连。
5.根据权利要求2所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:主控电路(156)中的FPGA选用ALTERA公司的EP2C8F256;TGC放大电路(151)采用ADI公司的AD8332;A/D采样电路(153)中的A/D转换器采用的是TI公司的ADS5270。
6.根据权利要求2所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:数据采集电路(154)中FPGA选用ALTERA公司的EP2C35F672;USB数据传输电路(155)中USB芯片选用Cypress公司的EZ-USB FX2LP。
3.根据权利要求1所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:脉冲激光处理装置包括扩束镜(2)、反射镜(3)、套筒(4)、凹透镜(6)、凸透镜(7)和毛玻璃(8),脉冲激光器(1)发出的脉冲激光由扩束镜(2)扩束,扩束后的光束由反射镜(3)反射至样品池(12)方向,反射光束穿过套筒(4),并经过凹透镜(6)、凸透镜(7)和毛玻璃(8)出射,出射光束打在光学掩膜(9)上。
4.根据权利要求1所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:脉冲激光器(1)采用倍频的Q-Switched Nd:YAG脉冲激光器,波长为532nm,脉冲宽度为7ns,重复频率是20Hz;光学掩膜(9)采用数字微镜元件DMD。
7.基于权利要求2所述的基于压缩感知的单阵元多角度观测光声成像装置的光声成像方法,其特征在于:它包括以下步骤:
步骤一、将待测生物组织(10)放置在样品池(12)内的中心位置,主控电路(156)内置的FPGA发射脉冲信号触发脉冲激光器(1),同时控制光学掩膜(9)产生随机矩阵,脉冲激光器(1)产生激光脉冲,激光脉冲经脉冲激光处理装置处理后,透过光学掩膜(9)照射到待测生物组织(10)上,产生光声信号;
步骤二、伺服电机及驱动器(5)通过套筒(4)、支架(13)调整两个单阵元超声探测器(11)的观测角度,使两个单阵元超声探测器(11)的阵元面的中心与待测生物组织(10)的中心在一条直线上,且所述单阵元超声探测器(11)的阵元面对准待测生物组织(10)的水平切面,利用信号采集电路(15)对光声信号进行同步采集;
主控电路(156)激励脉冲激光器(1)开始工作的同时产生扫查时序控制信号,控制数据采集电路(154)和信号采集电路(15)中的其它电路协调工作,TGC放大电路(151)将单阵元超声探测器(11)观测的光声信号通过TGC放大器来补偿随传播距离增大而逐渐衰减的回波信号,放大后的信号通过预滤波电路(152)滤波,然后通过A/D采样电路(153)转换为数字回波信号;数据采集电路(154)接收数字回波数据;
步骤三、数据采集电路(154)采用FPGA实现对双通道A/D转换器回波数据的缓存,通过USB数据传输电路(155)将回波数据输出到计算机(14)内存中;
步骤四、计算机(14)对两个单阵元超声探测器(11)接收到的回波数据基于压缩感知算法进行图像重建,然后将不同角度观测到的图像进行融合处理,获取待测生物组织(10)的光声图像。
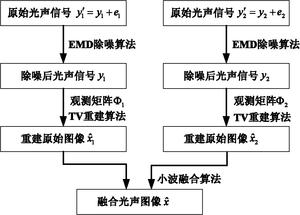
8.根据权利要求7所述的基于压缩感知的单阵元多角度观测光声成像方法,其特征在于,步骤四中计算机(14)对两个单阵元超声探测器(11)接收到的回波数据基于压缩感知算法进行图像重建的过程:
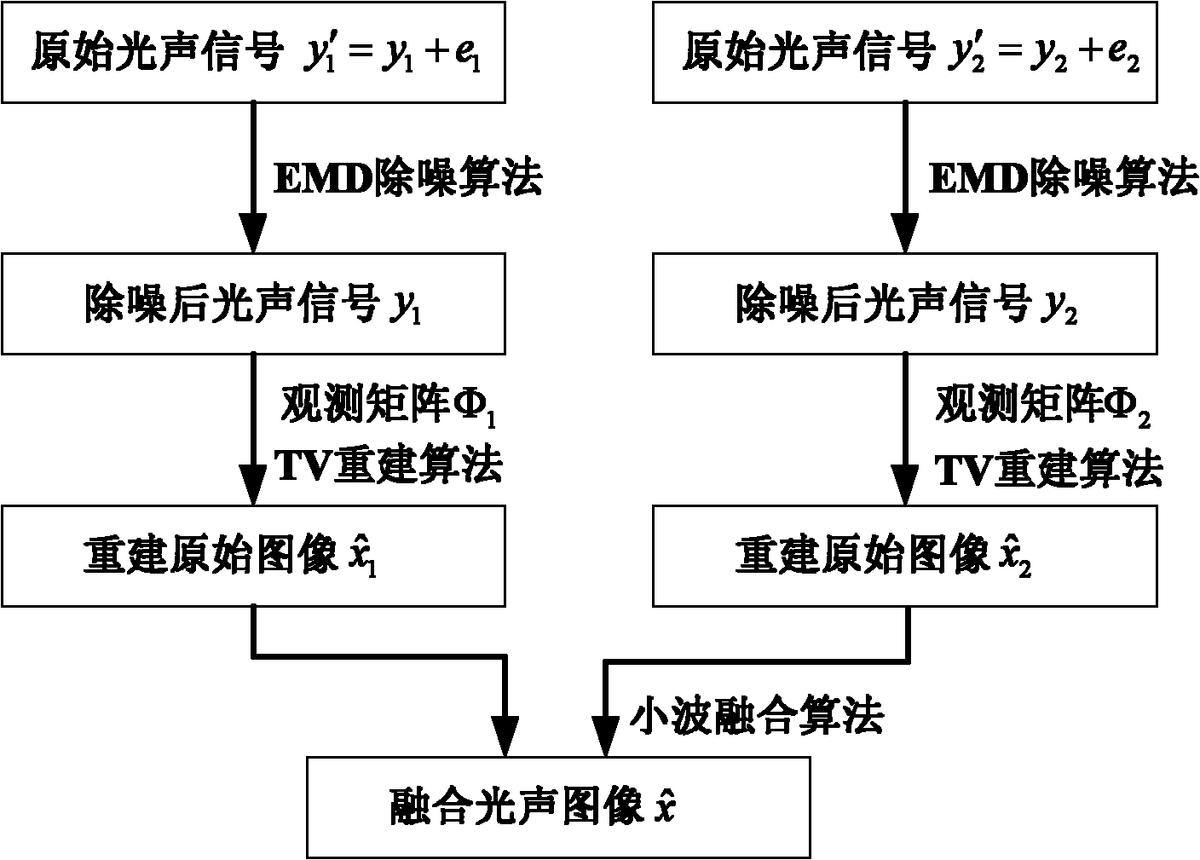
步骤41、对两个单阵元超声探测器(11)采集的原始光声信号分别应用EMD方法降噪,得到降噪后信号y 1′和y 2′,
y 1′=y 1+e 1,y 2′=y 2+e 2,其中y 1和y 2为原始光声信号;
步骤42、选取高斯随机矩阵为观测矩阵Φ,最小全变分法TV法的重建算法,求取最优解 和 作为重建原始图像;
步骤43、采用小波变换融合算法将所述重建原始图像 和 融合到一起;
调整两个单阵元超声探测器(11)的观测角度,将步骤41至步骤42重复执行n次,n取值50~100,然后将n次获得的n幅图像进行融合处理,获取待测生物组织(10)的光声图像。
9.根据权利要求7所述的基于压缩感知的单阵元多角度观测光声成像方法,其特征在于,步骤42采用最小全变分法TV法的重建算法求取最优解 和 的过程为:
步骤421、将初始解设置为一个零矩阵,设置迭代次数,初始化Lagrang常数,并生成正交小波矩阵;
步骤422、计算牛顿常数μ k和第k步的Lagrang常数λ k;
步骤423、根据 计算 根据 计算每点的全变分梯度,进而由 计算新的梯度
步骤424、由 计算出当前的迭代结果,并返回步骤422继续迭代。
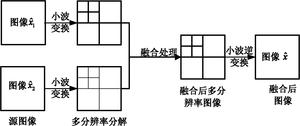
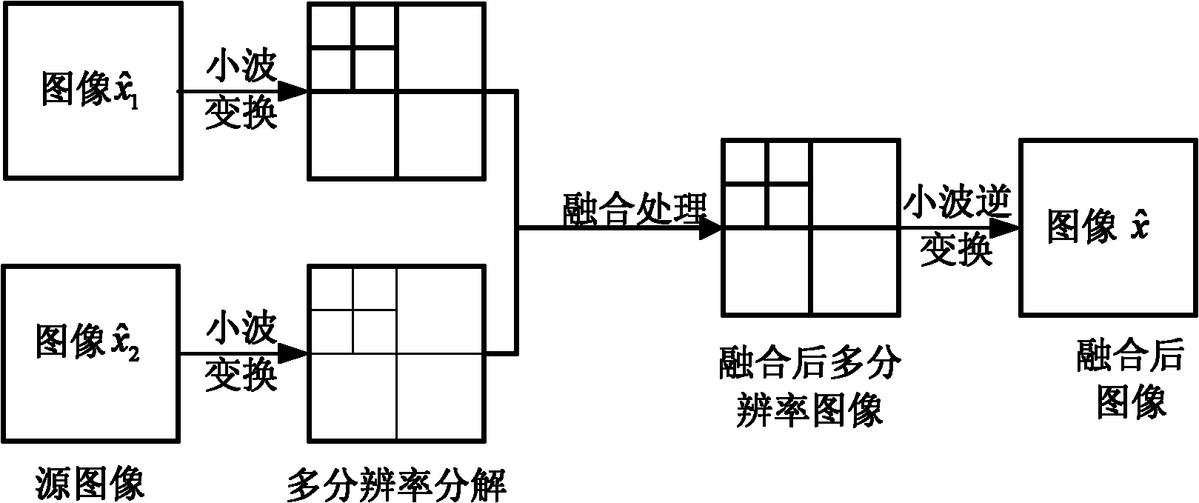
10.根据权利要求7所述的基于压缩感知的单阵元多角度观测光声成像方法,其特征在于,步骤43采用小波变换融合算法将多角度观测到的光声图像 和 融合到一起的过程为:
步骤431、对光声图像 和 分别进行二维离散小波变换,建立图像小波域系数;
步骤432、对各分解层分别进行融合处理,各分解层上的不同频率分量可采用不同的融合规则进行处理,最终得到融合后的小波域系数;
步骤433、对融合后所得小波系数进行小波反变换即进行图像重构,所得到的重构图像即为融合图像
1.基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:它包括脉冲激光器(1)、脉冲激光处理装置、伺服电机及驱动器(5)、光学掩膜(9)、单阵元超声探测器(11)、样品池(12)、支架(13)、计算机(14)和信号采集电路(15),
在样品池(12)的正上方设置光学掩膜(9),信号采集电路(15)的测量矩阵输出端与光学掩膜(9)的输入端相连,信号采集电路(15)的光束控制端与脉冲激光器(1)的控制端相连,脉冲激光器(1)发出的脉冲激光经过脉冲激光处理装置处理后,发射至透过光学掩膜(9)表面,并透过光学掩膜(9)照射在样品池(12)内,
两个单阵元超声探测器(11)镜像设置在样品池(12)内左右两侧,所述单阵元超声探测器(11)通过支架(13)和伺服电机及驱动器(5)的动力输出端固定连接,所述伺服电机及驱动器(5)能够通过支架(13)控制所述单阵元超声探测器(11)的阵元面的旋转角度,每个单阵元超声探测器(11)的回波信号输出端与信号采集电路(15)的光声信号输入端相连,信号采集电路(15)将处理过的回波数据输出给计算机(14),计算机(14)用于采用基于压缩感知算法完成对回波数据进行图像重建,并将单阵元超声探测器(11)不同角度观测到的图像进行融合处理,获取待测生物组织(10)的光声图像。
2.根据权利要求1所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:信号采集电路(15)包括TGC放大电路(151)、预滤波电路(152)、A/D采样电路(153)、数据采集电路(154)、USB数据传输电路(155)和主控电路(156),
主控电路(156)内置FPGA,主控电路(156)内置的FPGA控制光学掩膜(9)产生压缩感知重建算法的测量矩阵,主控电路(156)内置的FPGA控制触发脉冲激光器(1)产生脉冲激光,主控电路(156)的串行数据控制端与USB数据传输电路(155)的串行数据控制端相连,主控电路(156)的数据采集信号控制端与数据采集电路(154)的信号控制端相连,主控电路(156)的A/D采样信号控制端与A/D采样电路(153)的信号控制端相连,主控电路(156)的放大信号控制端与TGC放大电路(151)的信号控制端相连,
TGC放大电路(151)接收两个单阵元超声探测器(11)观测的光声信号,TGC放大电路(151)的输出端与预滤波电路(152)的输入端相连,预滤波电路(152)的输出端与A/D采样电路(153)的输入端相连,A/D采样电路(153)的输出端与数据采集电路(154)的输入端相连,数据采集电路(154)的输出端与USB数据传输电路(155)的输入端相连,USB数据传输电路(155)的输出端与计算机(14)的输入端相连。
3.根据权利要求1所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:脉冲激光处理装置包括扩束镜(2)、反射镜(3)、套筒(4)、凹透镜(6)、凸透镜(7)和毛玻璃(8),脉冲激光器(1)发出的脉冲激光由扩束镜(2)扩束,扩束后的光束由反射镜(3)反射至样品池(12)方向,反射光束穿过套筒(4),并经过凹透镜(6)、凸透镜(7)和毛玻璃(8)出射,出射光束打在光学掩膜(9)上。
4.根据权利要求1所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:脉冲激光器(1)采用倍频的Q-Switched Nd:YAG脉冲激光器,波长为532nm,脉冲宽度为7ns,重复频率是20Hz;光学掩膜(9)采用数字微镜元件DMD。
5.根据权利要求2所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:主控电路(156)中的FPGA选用ALTERA公司的EP2C8F256;TGC放大电路(151)采用ADI公司的AD8332;A/D采样电路(153)中的A/D转换器采用的是TI公司的ADS5270。
6.根据权利要求2所述的基于压缩感知的单阵元多角度观测光声成像装置,其特征在于:数据采集电路(154)中FPGA选用ALTERA公司的EP2C35F672;USB数据传输电路(155)中USB芯片选用Cypress公司的EZ-USB FX2LP。
7.基于权利要求2所述的基于压缩感知的单阵元多角度观测光声成像装置的光声成像方法,其特征在于:它包括以下步骤:
步骤一、将待测生物组织(10)放置在样品池(12)内的中心位置,主控电路(156)内置的FPGA发射脉冲信号触发脉冲激光器(1),同时控制光学掩膜(9)产生随机矩阵,脉冲激光器(1)产生激光脉冲,激光脉冲经脉冲激光处理装置处理后,透过光学掩膜(9)照射到待测生物组织(10)上,产生光声信号;
步骤二、伺服电机及驱动器(5)通过套筒(4)、支架(13)调整两个单阵元超声探测器(11)的观测角度,使两个单阵元超声探测器(11)的阵元面的中心与待测生物组织(10)的中心在一条直线上,且所述单阵元超声探测器(11)的阵元面对准待测生物组织(10)的水平切面,利用信号采集电路(15)对光声信号进行同步采集;
主控电路(156)激励脉冲激光器(1)开始工作的同时产生扫查时序控制信号,控制数据采集电路(154)和信号采集电路(15)中的其它电路协调工作,TGC放大电路(151)将单阵元超声探测器(11)观测的光声信号通过TGC放大器来补偿随传播距离增大而逐渐衰减的回波信号,放大后的信号通过预滤波电路(152)滤波,然后通过A/D采样电路(153)转换为数字回波信号;数据采集电路(154)接收数字回波数据;
步骤三、数据采集电路(154)采用FPGA实现对双通道A/D转换器回波数据的缓存,通过USB数据传输电路(155)将回波数据输出到计算机(14)内存中;
步骤四、计算机(14)对两个单阵元超声探测器(11)接收到的回波数据基于压缩感知算法进行图像重建,然后将不同角度观测到的图像进行融合处理,获取待测生物组织(10)的光声图像。
8.根据权利要求7所述的基于压缩感知的单阵元多角度观测光声成像方法,其特征在于,步骤四中计算机(14)对两个单阵元超声探测器(11)接收到的回波数据基于压缩感知算法进行图像重建的过程:
步骤41、对两个单阵元超声探测器(11)采集的原始光声信号分别应用EMD方法降噪,得到降噪后信号y1′和y2′,
y1′=y1+e1,y2′=y2+e2,其中y1和y2为原始光声信号;
步骤42、选取高斯随机矩阵为观测矩阵Φ,最小全变分法TV法的重建算法,求取最优解和作为重建原始图像;
步骤43、采用小波变换融合算法将所述重建原始图像和融合到一起;
调整两个单阵元超声探测器(11)的观测角度,将步骤41至步骤42重复执行n次,n取值50~100,然后将n次获得的n幅图像进行融合处理,获取待测生物组织(10)的光声图像。
9.根据权利要求7所述的基于压缩感知的单阵元多角度观测光声成像方法,其特征在于,步骤42采用最小全变分法TV法的重建算法求取最优解和的过程为:
步骤421、将初始解设置为一个零矩阵,设置迭代次数,初始化Lagrang常数,并生成正交小波矩阵;
步骤422、计算牛顿常数μk和第k步的Lagrang常数λk;
步骤423、根据计算根据计算每点的全变分梯度,进而由计算新的梯度
步骤424、由计算出当前的迭代结果,并返回步骤422继续迭代。
10.根据权利要求7所述的基于压缩感知的单阵元多角度观测光声成像方法,其特征在于,步骤43采用小波变换融合算法将多角度观测到的光声图像和融合到一起的过程为:
步骤431、对光声图像和分别进行二维离散小波变换,建立图像小波域系数;
步骤432、对各分解层分别进行融合处理,各分解层上的不同频率分量可采用不同的融合规则进行处理,最终得到融合后的小波域系数;
步骤433、对融合后所得小波系数进行小波反变换即进行图像重构,所得到的重构图像即为融合图像
说明书
技术领域
本发明涉及基于压缩感知的单阵元多角度观测光声成像装置及方法,属于光声成像技术领域。
背景技术
光声成像作为一种新兴的医学影像技术,有机地结合了光学成像和声学成像的特点,可以提供深层组织的高分辨率和高对比度的组织断层图像,图像对比度高、分辨率高,传递的信息量大,可以提供形态信息以外其他丰富的光学吸收和散射信息,是一种很有前途的医学检测方法。
近年来,光声技术应用于生物组织的成像研究已经取得了很大进展,而光声成像装置的好坏主要与装置成本、成像质量和成像时间息息相关。装置成本主要与信号的采集策略、使用的探测器类型密切相关,成像质量和成像时间则主要取决于所使用的图像重建算法。例如,如果采用单个非聚焦的超声探测器采集信号,一般采用旋转探测器或者样品的方式采集光声信号,其图像重建算法一般采用反投影类算法,重建时间长,实际中通常用不完备的数据进行图像重建,重建图像的伪迹严重,图像变形;而如果采用多元阵列探测器采集光声信号,一般采用侧向模式或者后向模式,相应的图像重建算法有相控聚焦、迭代重建、傅立叶重建算法等等,硬件成本较高并且图像横向分辨率差。
发明内容
本发明目的是为了解决现有光声技术进行生物组织的成像存在伪迹严重、图像变形、硬件成本较高并且图像横向分辨率差的问题,提供了一种基于压缩感知的单阵元多角度观测光声成像装置及方法。
本发明基于压缩感知的单阵元多角度观测光声成像装置包括脉冲激光器、脉冲激光处理装置、伺服电机及驱动器、光学掩膜、单阵元超声探测器、样品池、支架、计算机和信号采集电路,
在样品池的正上方设置光学掩膜,信号采集电路的测量矩阵输出端与光学掩膜的输入端相连,信号采集电路的光束控制端与脉冲激光器的控制端相连,脉冲激光器发出的脉冲激光经过脉冲激光处理装置处理后,发射至透过光学掩膜表面,并透过光学掩膜照射在样品池内,
两个单阵元超声探测器镜像设置在样品池内左右两侧,所述单阵元超声探测器通过支架和伺服电机及驱动器的动力输出端固定连接,所述伺服电机及驱动器能够通过支架控制所述单阵元超声探测器的阵元面的旋转角度,每个单阵元超声探测器的回波信号输出端与信号采集电路的光声信号输入端相连,信号采集电路将处理过的回波数据输出给计算机,计算机用于采用基于压缩感知算法完成对回波数据进行图像重建,并将单阵元超声探测器不同角度观测到的图像进行融合处理,获取待测生物组织的光声图像。
信号采集电路包括TGC放大电路、预滤波电路、A/D采样电路、数据采集电路、USB数据传输电路和主控电路,
主控电路内置FPGA,主控电路内置的FPGA控制光学掩膜产生压缩感知重建算法的测量矩阵,主控电路内置的FPGA控制触发脉冲激光器产生脉冲激光,主控电路的串行数据控制端与USB数据传输电路的串行数据控制端相连,主控电路的数据采集信号控制端与数据采集电路的信号控制端相连,主控电路的A/D采样信号控制端与A/D采样电路的信号控制端相连,主控电路的放大信号控制端与TGC放大电路的信号控制端相连,
TGC放大电路接收两个单阵元超声探测器观测的光声信号,TGC放大电路的输出端与预滤波电路的输入端相连,预滤波电路的输出端与A/D采样电路的输入端相连,A/D采样电路的输出端与数据采集电路的输入端相连,数据采集电路的输出端与USB数据传输电路的输入端相连,USB数据传输电路的输出端与计算机的输入端相连。
基于上述基于压缩感知的单阵元多角度观测光声成像装置的光声成像方法,它包括以下步骤:
步骤一、将待测生物组织放置在样品池内的中心位置,主控电路内置的FPGA发射脉冲信号触发脉冲激光器,同时控制光学掩膜产生随机矩阵,脉冲激光器产生激光脉冲,激光脉冲经脉冲激光处理装置处理后,透过光学掩膜照射到待测生物组织上,产生光声信号;
步骤二、伺服电机及驱动器通过套筒、支架调整两个单阵元超声探测器的观测角度,使两个单阵元超声探测器的阵元面的中心与待测生物组织的中心在一条直线上,且所述单阵元超声探测器的阵元面对准待测生物组织的水平切面,利用信号采集电路对光声信号进行同步采集;
主控电路激励脉冲激光器开始工作的同时产生扫查时序控制信号,控制数据采集电路和信号采集电路中的其它电路协调工作,TGC放大电路将单阵元超声探测器观测的光声信号通过TGC放大器来补偿随传播距离增大而逐渐衰减的回波信号,放大后的信号通过预滤波电路滤波,然后通过A/D采样电路转换为数字回波信号;数据采集电路接收数字回波数据;
步骤三、数据采集电路采用FPGA实现对双通道A/D转换器回波数据的缓存,通过USB数据传输电路将回波数据输出到计算机内存中;
步骤四、计算机对两个单阵元超声探测器接收到的回波数据基于压缩感知算法进行图像重建,然后将不同角度观测到的图像进行融合处理,获取待测生物组织的光声图像。
本发明的优点:
1、本发明采用两个单阵元探测器固定位置成角度并行采集,减少了硬件成本和采集时间,同时使成像装置操作简单、可靠性好。
2、本发明采用两个成角度的单阵元超声探测器同步观测并采集原始光声信号,可以改变观测角度,通过将不同观测角度的光声图像的融合来提高图像质量,减少伪迹现象。
3、本发明采用EMD(经验模态分解)方法来除噪,利用EMD分解自适应的信号分解和降噪能力,有效除去光声信号中的高斯白噪声和探测器采集带来的喇叭型噪声,提高光声信号信噪比;通过压缩感知重建算法进行光声图像重建,能以更少的采样数据来恢复原始信号,在数据不完备的情况下保证成像的高分辨率。
附图说明
图1是本发明基于压缩感知的单阵元多角度观测光声成像装置结构示意图;
图2是本发明基于压缩感知的单阵元多角度光声成像重建算法流程图;
图3是基于小波变换的光声图像融合原理图;
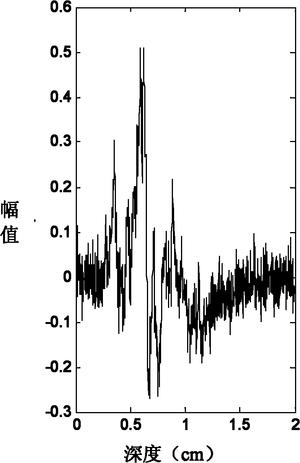
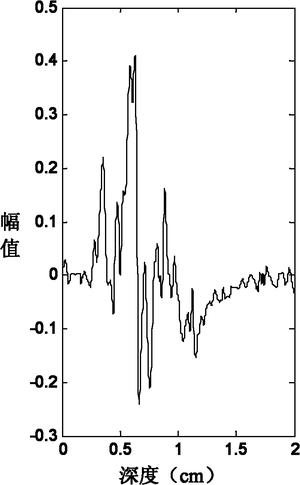
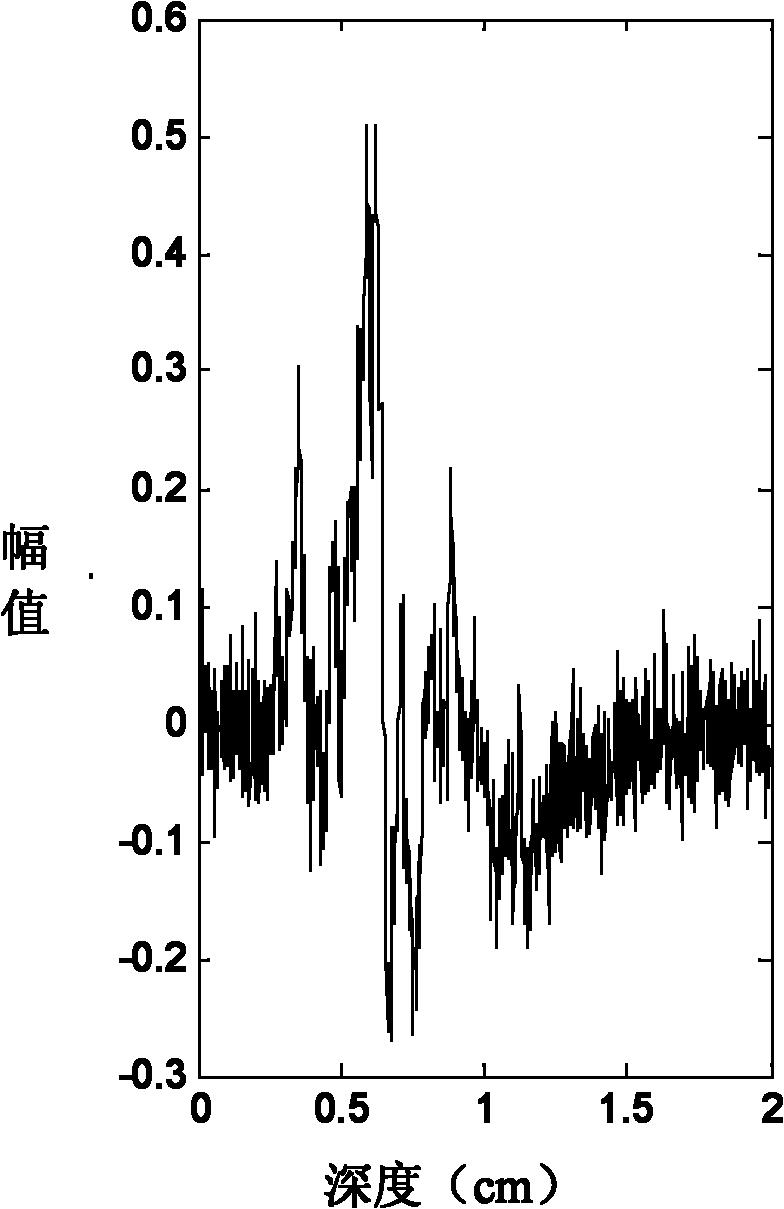
图4是基于压缩感知的单阵元多角度观测光声成像装置采集的原光声信号图
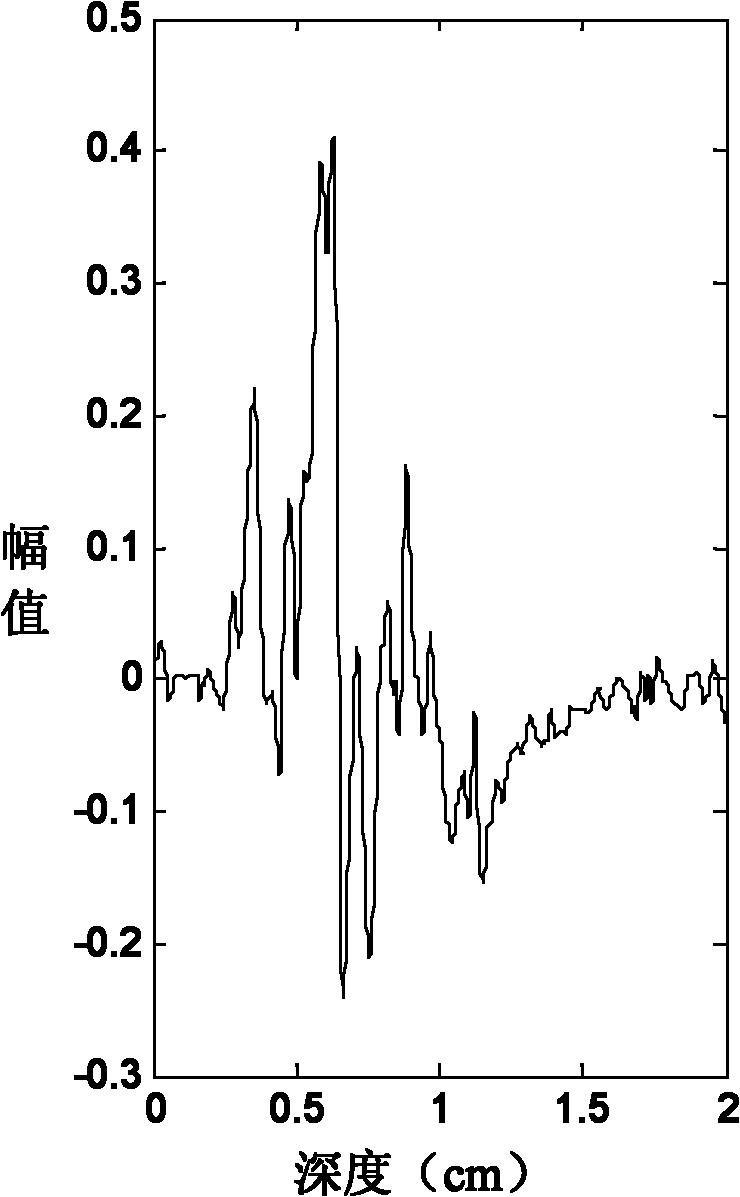
图5是基于压缩感知的单阵元多角度观测光声成像装置采集的原光声信号采用EMD方法除噪结果图;
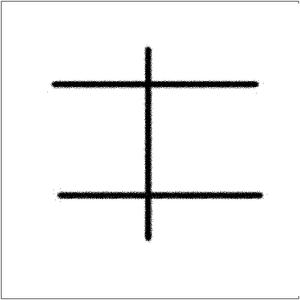
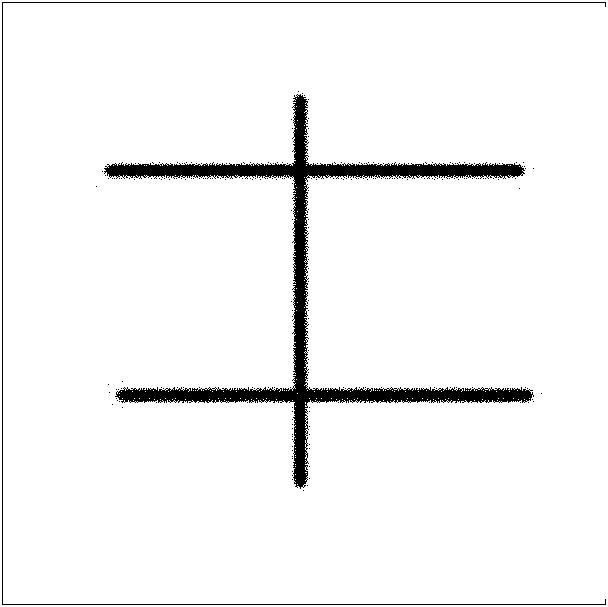
图6是基于压缩感知算法的样品示意图;
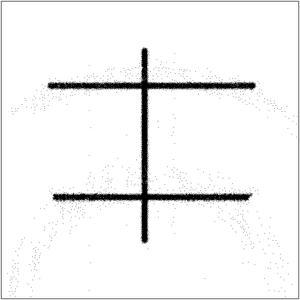
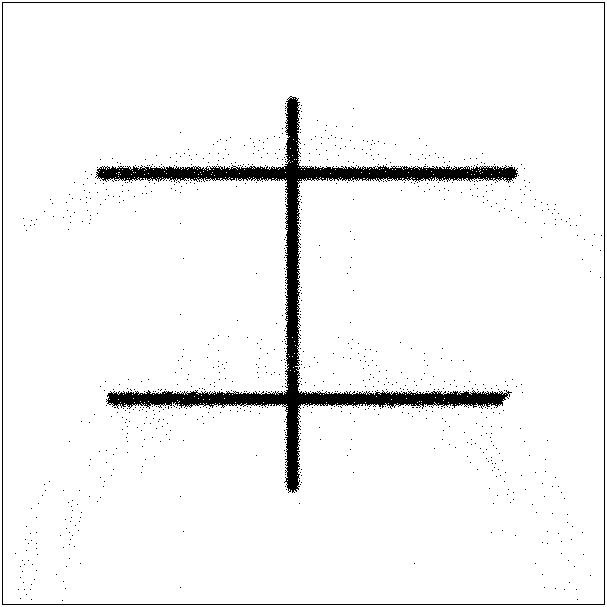
图7是基于压缩感知算法的光声图像重建图像。
具体实施方式
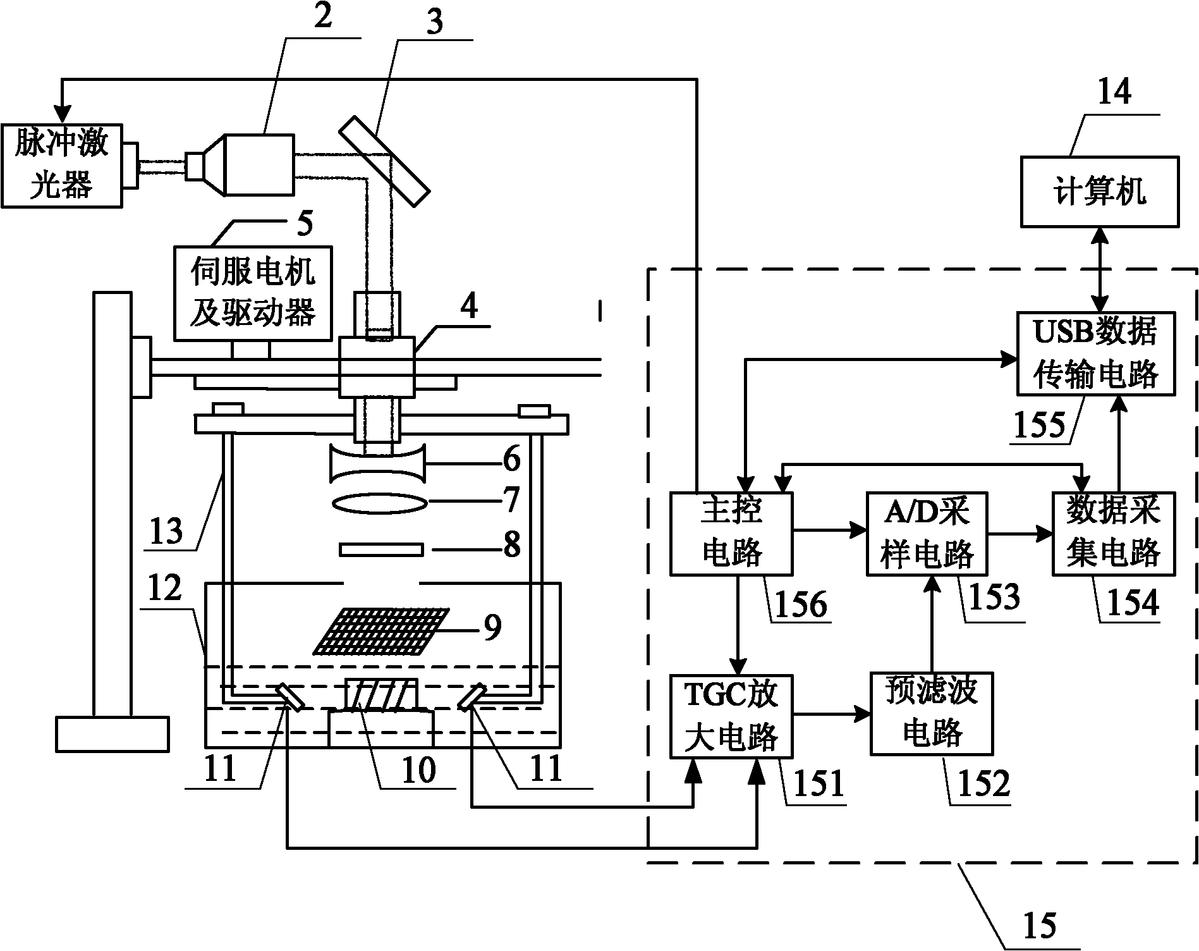
具体实施方式一:下面结合图1说明本实施方式,本实施方式基于压缩感知的单阵元多角度观测光声成像装置,它包括脉冲激光器1、脉冲激光处理装置、伺服电机及驱动器5、光学掩膜9、单阵元超声探测器11、样品池12、支架13、计算机14和信号采集电路15,
在样品池12的正上方设置光学掩膜9,信号采集电路15的测量矩阵输出端与光学掩膜9的输入端相连,信号采集电路15的光束控制端与脉冲激光器1的控制端相连,脉冲激光器1发出的脉冲激光经过脉冲激光处理装置处理后,发射至透过光学掩膜9表面,并透过光学掩膜9照射在样品池12内,
两个单阵元超声探测器11镜像设置在样品池12内左右两侧,所述单阵元超声探测器11通过支架13和伺服电机及驱动器5的动力输出端固定连接,所述伺服电机及驱动器5能够通过支架13控制所述单阵元超声探测器11的阵元面的旋转角度,每个单阵元超声探测器11的回波信号输出端与信号采集电路15的光声信号输入端相连,信号采集电路15将处理过的回波数据输出给计算机14,计算机14用于采用基于压缩感知算法完成对回波数据进行图像重建,并将单阵元超声探测器11不同角度观测到的图像进行融合处理,获取待测生物组织10的光声图像。
信号采集电路15包括TGC放大电路151、预滤波电路152、A/D采样电路153、数据采集电路154、USB数据传输电路155和主控电路156,
主控电路156内置FPGA,主控电路156内置的FPGA控制光学掩膜9产生压缩感知重建算法的测量矩阵,主控电路156内置的FPGA控制触发脉冲激光器1产生脉冲激光,主控电路156的串行数据控制端与USB数据传输电路155的串行数据控制端相连,主控电路156的数据采集信号控制端与数据采集电路154的信号控制端相连,主控电路156的A/D采样信号控制端与A/D采样电路153的信号控制端相连,主控电路156的放大信号控制端与TGC放大电路151的信号控制端相连,
TGC放大电路151接收两个单阵元超声探测器11观测的光声信号,TGC放大电路151的输出端与预滤波电路152的输入端相连,预滤波电路152的输出端与A/D采样电路153的输入端相连,A/D采样电路153的输出端与数据采集电路154的输入端相连,数据采集电路154的输出端与USB数据传输电路155的输入端相连,USB数据传输电路155的输出端与计算机14的输入端相连。
脉冲激光器1选用倍频的Q-Switched Nd:YAG脉冲激光器,波长为532nm,脉冲宽度为7ns,重复频率是20Hz;光学掩膜9采用数字微镜元件DMD,入射光场对应于待重建图像经透镜汇聚后被DMD阵列反射,DMD上微镜片方向根据计算机14生成的服从高斯分布的随机矩阵来调制,光学掩膜9中每块微镜片的启通和断开,实现激光束的开关效应。
主控电路156中的FPGA选用ALTERA公司的EP2C8F256;
TGC放大电路151采用ADI公司的AD8332;
A/D采样电路153中的A/D转换器采用的是TI公司的ADS5270;
数据采集电路154中FPGA选用ALTERA公司的EP2C35F672;
USB数据传输电路155中USB芯片选用Cypress公司的EZ-USB FX2LP;
计算机16选用普通PC机,内存在512M以上,人机交互界面采用Visual C++开发环境实现。
压缩感知的基本原理可概括为:利用原信号往往具有稀疏性或者是可压缩的特点,利用其在特定感知矩阵上的投影作为测量数据,采用稀疏约束重构算法可恢复原信号,可以通过少量的随机采样信号实现原信号的重建,因此在数据不完备的情况下压缩感知算法更能体现它在图像重建方面的优越性。本装置通过两个单阵元超声探测器成角度采集光声信号,然后基于压缩感知算法进行光声图像重建并进行融合处理。采用单阵元探测器代替阵列探头节省了硬件成本;固定位置采集代替圆周采集光声信号,节省了采集时间;采用压缩感知重建算法代替传统的滤波反投影算法,减少采样数据,缩短成像时间的同时保证了图像的高分辨率,而且有效消除了光声图像的伪迹现象。
本发明的工作原理是:主控电路发送脉冲信号给激光器,同时控制光学掩膜产生随机矩阵,激光器产生脉冲激光束通过光学掩膜照射到待测生物组织上,产生光声信号;伺服电机及驱动器通过支架可调整两个单阵元超声探测器的观测角度180°,90°,通过支架的升降调整两个单阵元超声探测器的纵向位置;利用单阵元超声探测器同步观测光声信号,信号采集电路对光声信号进行同步采集、时间增益补偿放大、信号预滤波、A/D采样转换和数据采集,然后通过USB接口将数据输入到计算机内存中,最后在计算机上进行光声图像重建与融合处理。
本发明伺服电机及驱动器5通过支架13与单阵元探测器11机械连接,伺服电机及驱动器5通过支架13可调整两个单阵元超声探测器11的观测角度180°,90°,采集不同角度的光声信号进行图像重建后进行融合;通过支架13的升降调整两个单阵元超声探测器11的纵向位置,采集不同断层的光声信号进行重建后实现光声的三维成像。
具体实施方式二:下面结合图2至图7说明本实施方式,基于本实施方式一所述的基于压缩感知的单阵元多角度观测光声成像装置的方法,该方法包括以下步骤:
步骤一、将待测生物组织10放置在样品池12内的中心位置,主控电路156内置的FPGA发射脉冲信号触发脉冲激光器1,同时控制光学掩膜9产生随机矩阵,脉冲激光器1产生激光脉冲,激光脉冲经脉冲激光处理装置处理后,透过光学掩膜9照射到待测生物组织10上,产生光声信号;
步骤二、伺服电机及驱动器5通过套筒4、支架13调整两个单阵元超声探测器11的观测角度,使两个单阵元超声探测器11的阵元面的中心与待测生物组织10的中心在一条直线上,且所述单阵元超声探测器11的阵元面对准待测生物组织10的水平切面,利用信号采集电路15对光声信号进行同步采集;
主控电路156激励脉冲激光器1开始工作的同时产生扫查时序控制信号,控制数据采集电路154和信号采集电路15中的其它电路协调工作,TGC放大电路151将单阵元超声探测器11观测的光声信号通过TGC放大器来补偿随传播距离增大而逐渐衰减的回波信号,放大后的信号通过预滤波电路152滤波,然后通过A/D采样电路153转换为数字回波信号;数据采集电路154接收数字回波数据;
步骤三、数据采集电路154采用FPGA实现对双通道A/D转换器回波数据的缓存,通过USB数据传输电路155将回波数据输出到计算机14内存中;
步骤四、计算机14对两个单阵元超声探测器11接收到的回波数据基于压缩感知算法进行图像重建,然后将不同角度观测到的图像进行融合处理,获取待测生物组织10的光声图像。
步骤四中计算机14对两个单阵元超声探测器11接收到的回波数据基于压缩感知算法进行图像重建的过程:
步骤41、对两个单阵元超声探测器11采集的原始光声信号分别应用EMD方法降噪,得到降噪后信号y1′和y2′,
y1′=y1+e1,y2′=y2+e2,其中y1和y2为原始光声信号;
步骤42、选取高斯随机矩阵为观测矩阵Φ,最小全变分法TV法的重建算法,求取最优解和作为重建原始图像;
步骤43、采用小波变换融合算法将所述重建原始图像和融合到一起;
调整两个单阵元超声探测器11的观测角度,将步骤41至步骤42重复执行n次,n取值50~100,然后将n次获得的n幅图像进行融合处理,获取待测生物组织10的光声图像。
步骤42采用最小全变分法TV法的重建算法求取最优解和的过程为:
步骤421、将初始解设置为一个零矩阵,设置迭代次数,初始化Lagrang常数,并生成正交小波矩阵;
步骤422、计算牛顿常数μk和第k步的Lagrang常数λk;
步骤423、根据计算根据计算每点的全变分梯度,进而由计算新的梯度
步骤424、由计算出当前的迭代结果,并返回步骤422继续迭代。
步骤43采用小波变换融合算法将多角度观测到的光声图像和融合到一起的过程为:
步骤431、对光声图像和分别进行二维离散小波变换,建立图像小波域系数;
步骤432、对各分解层分别进行融合处理,各分解层上的不同频率分量可采用不同的融合规则进行处理,最终得到融合后的小波域系数;
步骤433、对融合后所得小波系数进行小波反变换即进行图像重构,所得到的重构图像即为融合图像
本发明还提供一种基于压缩感知的单阵元多角度观测光声成像重建算法,具体步骤为:通过两个成角度的单阵元超声探测器同步观测并采集原始光声信号y′;对原始光声信号分别应用EMD方法除噪,得到除噪后信号y;选取高斯随机矩阵为观测矩阵Φ,最小全变分法TV法的重建算法,求取最优解和采用小波变换融合算法将多角度观测到的光声图像和融合到一起,提高图像的分辨率。
下面对压缩感知重建算法进行进一步具体描述。
光声信号的产生可以表示为:
▿2p(r,t)-1vs2∂2p(r,t)∂t2=-p0(r)vs2dδ(t)dt---(1) ]]>
其中,p0(r)=Γ(r)Ae(r),Ae(r)是介质光能量吸收分布函数,是光声转化效率,通常称为格林埃森参数,它表征体能量密度转换为光声压的大小,vs代表介质中声波传播速度,β代表等压膨胀系数,Cp是比热,代表哈密尔顿算子,p(r,t)代表在r位置t时刻的光声信号,p0(r)代表初始声压。
可设光声信号模型为:
y′=y+e=Φx+e,||e||2≤ε (2)
其中,x是光声初始声压p0(r)的向量表示,y′是位置r0处接收到的光声信号含噪声的向量表示,y是位置r0处接收到的纯光声信号,e是光声信号中含有的噪声,Φ是高斯随机观测矩阵。
设x为Ψ基下的K-稀疏信号,有M个不同的观测向量对信号x进行M次观测,每个观测值为yj=j>,若作为矩阵Φ的行,则可得:
y=Φx=ΦΨα=Θα (3)
其中Φ∈RM×N,Ψ∈RN×N,α∈RN×1,y ∈RM×1,Φ称之为观测矩阵。
选取高斯随机矩阵为观测矩阵Φ,则可由观测值y根据式3求取最优解这里我们采用了最小全变分法TV法的重建算法,可以满足图像的精确重构,得到如下模型:
minxTV(x)subject to||Φx-y||2≤ϵ---(4) ]]>
即可得:
minfH(x)=12||Φx-y||22+λTV(x)---(5) ]]>
其中则此方法的迭代过程可以写为:
xi,jk+1=xi,jk-μk▿i,jH(xk)---(6) ]]>
在牛顿法中μk=(ΦTΦ+εI)-1为一个常数,其中ε是一个很小的常数防止分母为0。
而其中从而有:
▿L(xk)=ΦT(Φxk-y)---(7) ]]>
图像x的水平和垂直方向上的梯度分别为:
Di,jv=xi,j-xi+1,j1≤iN0i=N---(8) ]]>
Di,jh=xi,j-xi,j+11≤jN0j=N---(9) ]]>
则每个点的全变分梯度为:
▿i,j(TV(xk))=Di,jvxk|▿i,jxk|+Di,jhxk|▿i,jxk|-Di-1,jvxk|▿i-1,jxk|-Di,j-1hxk|▿i,j-1xk|---(10) ]]>
其中ε为很小常数防止分母为0,而λk=0.99λk-1。由上式最终求取最优解和
图4是基于本发明装置采集的原光声信号,可以看出,探测到的原光声信号存在很强的背景白噪声,会导致重建图像的信噪比和对比度严重下降,限制光声检测的深度;图5是原光声信号应用EMD方法除噪后的结果。基于小波阈值的EMD除噪结果表明该方法对噪声有很强的抑制能力,大大提高超声回波信号的信噪比,可以最大限度的除去白噪声,保留有用回波信号。
图6是本发明装置的样品示意图,图7是基于压缩感知的单阵元多角度观测光声成像重建算法的重建图像,可以看出,重建图像分辨率较高,能够很好的反应原样品的结构细节,并且有效的消除了伪迹现象。
价值度评估
技术价值
经济价值
法律价值
0 0 060.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:60.0分
该专利价值中等 (仅供参考)
本专利文献中包含【2 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【被引用次数1 次】专利被引次数越多越能能够体现出该专利在相关技术领域研发中所发挥的基础性作用,代表着专利公开的内容有更多的产业利用价值。 【专利权的维持时间15 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 34.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
26 个月独立权利要求数量
0 个从属权利要求数量
0 个说明书页数
7 页实施例个数
0 个发明人数量
6 个被引用次数
1 次引用文献数量
1 个优先权个数
0 个技术分类数量
2 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
15法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...